

Multi-unmanned aerial vehicle cooperative task planning method based on clustering and genetic algorithm
A genetic algorithm and multi-UAV technology, applied in the field of multi-UAV collaborative mission planning based on clustering and genetic algorithms, to achieve optimal energy consumption, reduce error rates, improve flight efficiency and energy utilization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
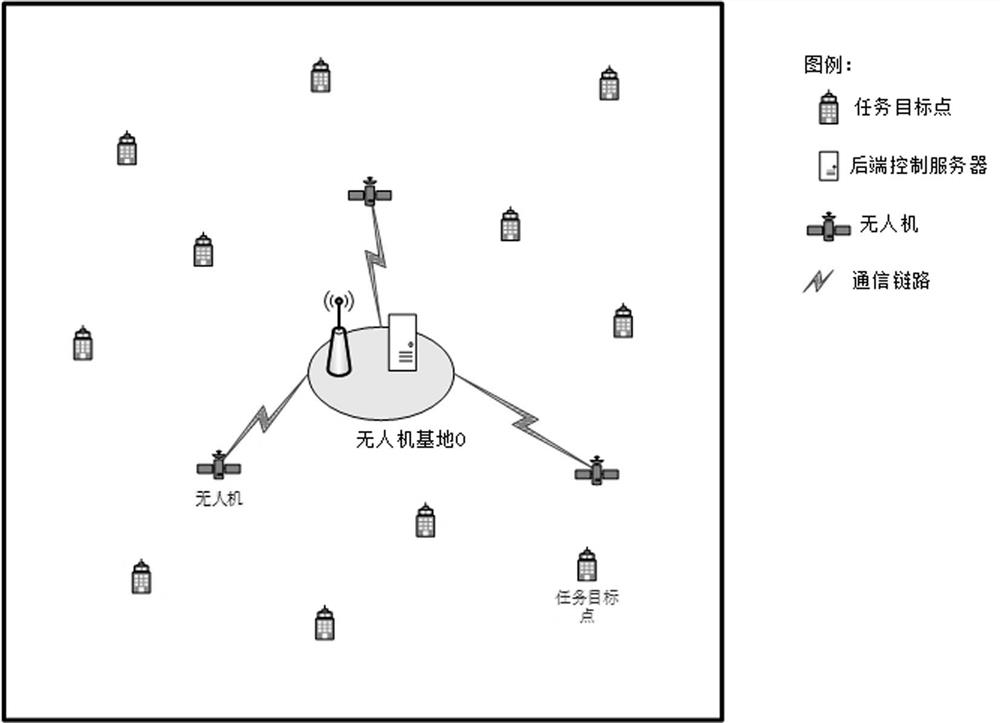
[0040] Embodiment 1: This embodiment starts with obtaining the mission waypoint, and determines the mission waypoint according to the type of mission. If the UAV needs to completely cover the entire area, the division can be determined according to the coverage of the sensor or camera mounted on the UAV. According to the specifications, the area to be measured is gridded by using the grid segmentation method, and the point to be measured is the center of each grid. Taking K UAVs as an example to coordinate the inspection of the rectangular area S to complete a multi-UAV coordination mission planning process.
[0041] Step 1. Obtain waypoints
[0042] There are multiple pre-marked important task points in the rectangular area S to be inspected, and they together form the task waypoint set of the inspection task And determine the coordinates of all task points in the area S.
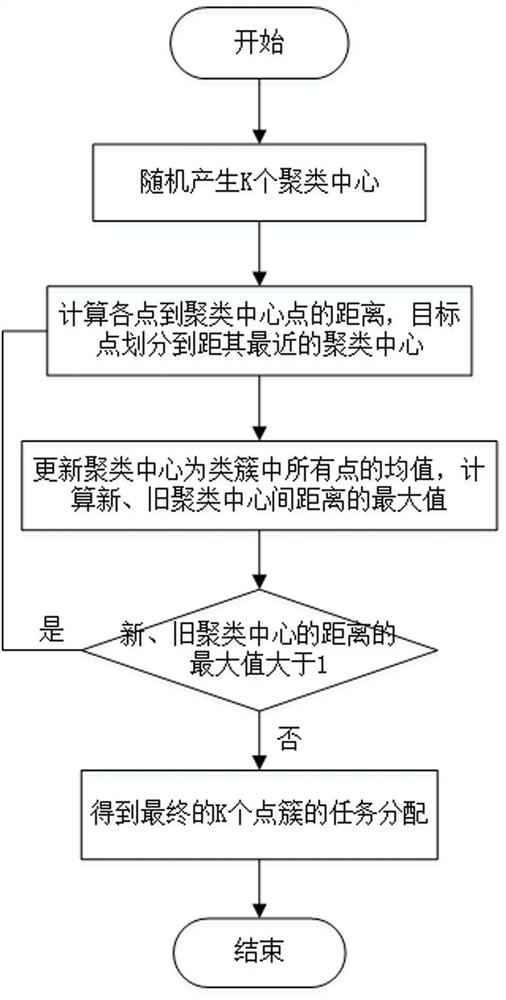
[0043] Step 2. Assignment of tasks
[0044] A total of K drones UAV = {UAV 1 ,UAV 2 ,…,UAV k} is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More