

Three-branch two-rotation ankle joint rehabilitation parallel robot mechanism
An ankle joint, three-branch technology, applied in passive exercise equipment, manipulators, program-controlled manipulators, etc., can solve problems such as strong coupling and complex solutions, achieve high flexibility, simple control design, improved accuracy and uncontrollable effect of error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The technical solution of the present invention will be clearly and completely described below in conjunction with specific embodiments. Apparently, the described embodiments are only a part of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
[0026] The "first" and "second" mentioned in the present invention are not to limit the quantity of corresponding technical features, but are names for distinguishing related technical features.
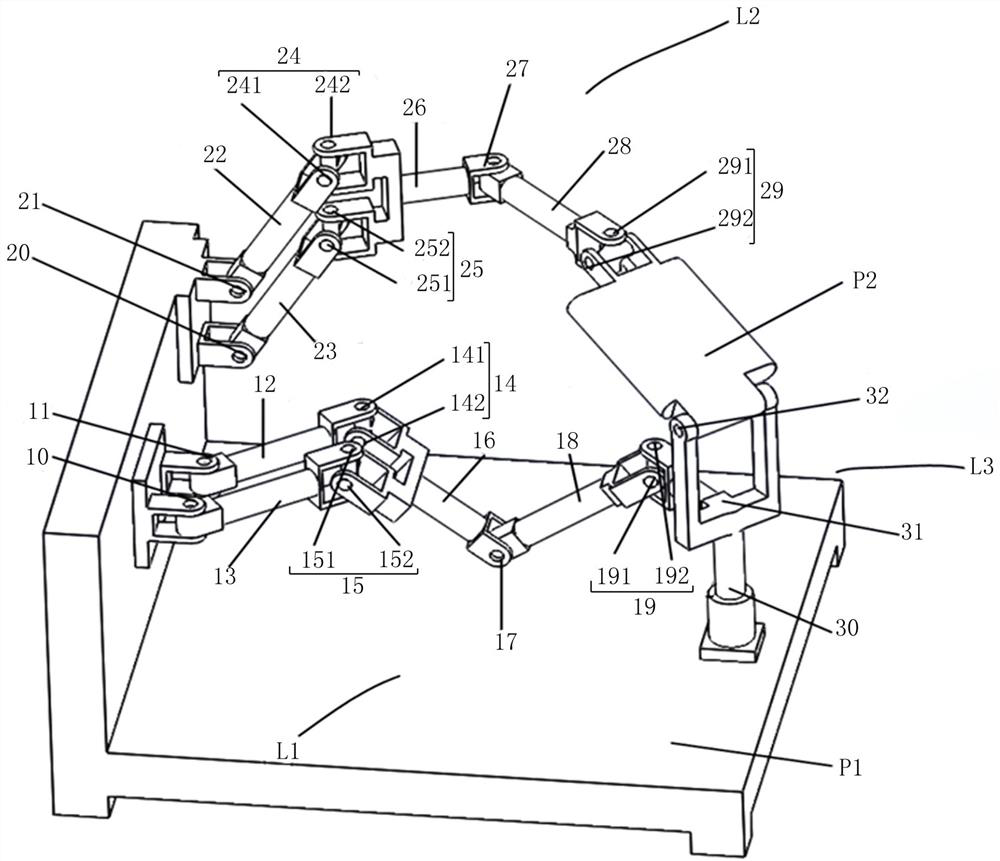
[0027] A parallel robot mechanism for ankle joint rehabilitation with three branches and two rotations, please refer to figure 1 , the parallel robot mechanism includes:
[0028] Set platform P1;
[0029] The moving platform P2, the moving platform P2 is set above the fixed platform P1 and its cross-section is rectang...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More