Reentry maneuvering trajectory target tracking algorithm based on variable structure multiple models
A target tracking and multi-model technology, applied in the field of re-entry maneuver ballistic target tracking algorithm, can solve problems such as difficult to effectively estimate, target variable aerodynamic parameters, poor anti-target maneuverability, etc., and achieve high convergence speed and steady-state accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
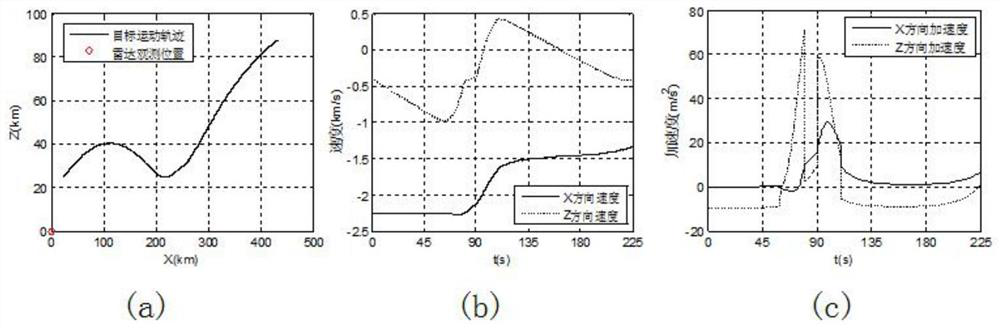
[0220] S7 Example Verification: Maneuvering Reentry Ballistic Target Tracking
[0221] S701. Parameter design: Algorithm parameter and state, parameter initial value setting: Complementary STC-AMIMM algorithm parameter setting: Model dwell time is set to β 12 = 3, β 21 = 1; the initial value of conversion probability is π 11 =0.95, π 22 =0.95, π 12 =0.05, π 21 = 0.05, i≠j; PCA model process noise variance is 0.01, PCJ model initial process noise variance is 50; the model dwell time of the complementary STC-VSAIMM algorithm is the same as that of the complementary STC-AMIMM algorithm: β 12 = 3, β 21 = 1; the initial model transition probability is π 11 =0.95, π 12 =0.01, π 13 =0.04, π 22 =0.9, π 21 =0.075, π 23 =0.025, π 33 =0.8, π 31 =0.009, π 32 =0.001, where π 11 The larger setting is mainly because the PCA extended model parameter estimation process should avoid interference from other models as much as possible, π 3i The smaller setting is mainly due to the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More