Multi-target trajectory anomaly processing method and system in micro-manipulation
An exception handling system and micromanipulation technology, applied in image data processing, instrumentation, computing, etc., can solve problems such as target crossing, high time cost, and trajectory error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
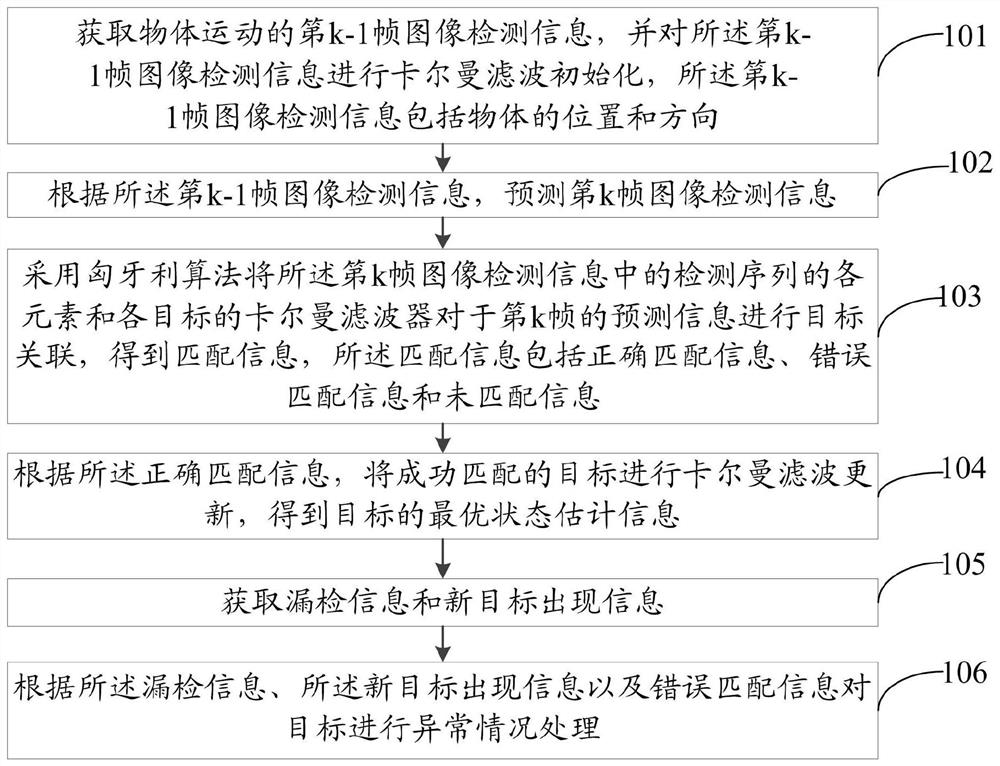
[0127] In this example, juvenile zebrafish was used as the experimental object, and a general trajectory abnormality processing method for model organisms was developed, which can improve the success rate of trajectory association of missing targets and improve the processing efficiency of abnormal situations. Specifically, a method for handling abnormalities in multi-target trajectories of zebrafish includes:
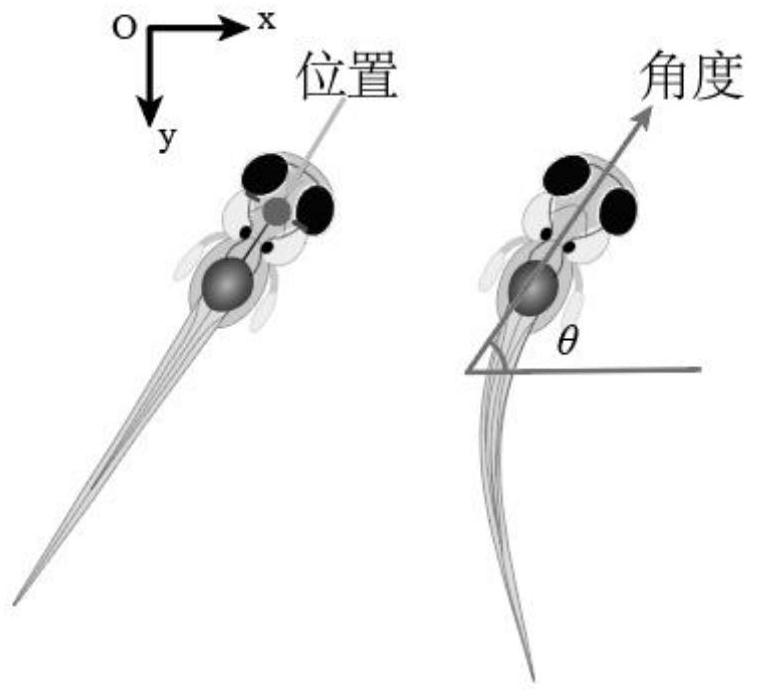
[0128] Step 301: Obtain the k-1th frame image detection information of zebrafish movement, and perform Kalman filter initialization on the k-1th frame image detection information, and the k-1th frame image detection information includes the position of the juvenile fish and direction;
[0129] Step 301: Predict the image detection information of the kth frame according to the image detection information of the k-1th frame;
[0130] Step 301: Use the Hungarian algorithm to associate each element of the detection sequence in the image detection information of the kth fr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com