

Single-stator single-rotor dual-system low-pulsating-torque permanent magnet brushless motor and driving method
A technology of permanent magnet brushless motor and pulsating torque, which is applied in the direction of torque pulsation control, magnetic circuit rotating parts, magnetic circuit, etc., which can solve the problems of increased manufacturing cost, complex motor structure, and application in low-power applications , to achieve the effect of offset suppression and reduction of ripple torque
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
preparation example Construction
[0039] The preparation process of the low pulsating torque permanent magnet brushless DC motor is as follows:
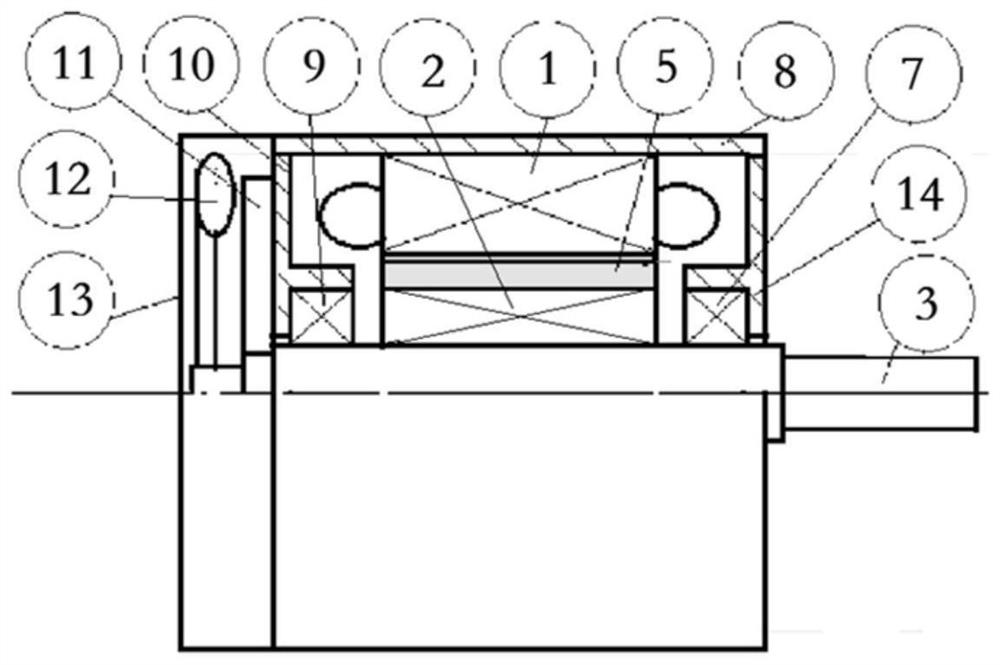
[0040] First process the stator core 1, the first winding group 4, the second winding group 6, the rotor core 2, the permanent magnetic steel 5, the central shaft 3, the front end cover 14, the front end cover bearing 7, the frame 8, and the rear end cover Bearing 9, rear end cover 10, position sensor 11, cooling fan 12 and fan cover 13.
[0041] Then install and assemble, specifically as follows: install the first winding group 4 and the second winding group 6 in the winding slots of the stator core 1 respectively, fix the stator with the windings in the frame 8, and install the two winding groups The lead-out line of the lead-out line is drawn out of the frame; the rotor core 2 is fixedly installed on the central shaft 3; the permanent magnetic steel 5 is fixed on the rotor core 2; the front end cover bearing 7 and the rear end cover bearing 9 are respectively embe...
Embodiment 2
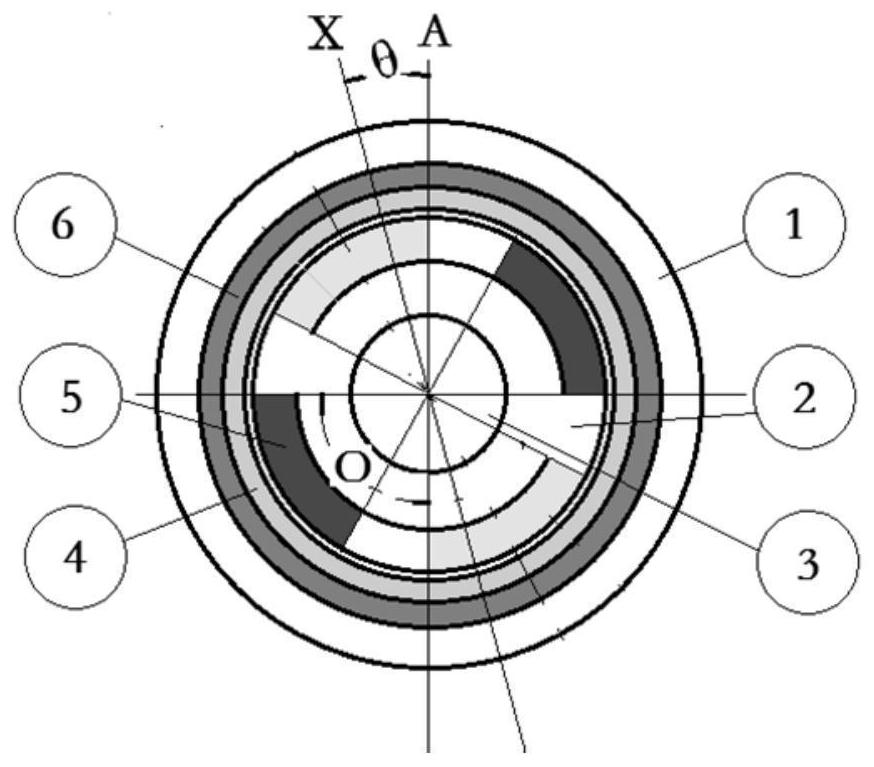
[0048] Such as image 3 As shown, the difference between this embodiment and Embodiment 1 is that the first winding group is evenly distributed along the inner side of the stator, accounting for 1 / 2 of the number of stator slots, and the number of pole pairs formed by the winding is the same as that of the rotor pole pairs. The winding groups are evenly distributed along the inner side of the stator. The electromagnetic parameters of the first winding group and the second winding group are the same. The two winding groups each account for 1 / 2 of the number of stator slots. The slots and the respective winding axes of the second winding group are offset by a certain angle θ from the corresponding winding axes of the first winding group, θ=360° / (4mn).
Embodiment 3
[0050] Such as Figure 7 As shown, the difference between this embodiment and Embodiment 1 is that: the pair of NS poles of the first winding group and the pair of NS poles of the second winding group are arranged adjacent to each other along the winding slots of the stator core, and in the first winding group The corresponding winding axis and the corresponding winding axis in the second winding group are staggered along the circumferential direction of the stator core or space angle. θ=360° / (4mn).
[0051] Such as Figure 4 and Figure 6 As shown, the first winding group and the second winding group each occupy 1 / 2 intervals in the tooth slots inside the stator core, and are evenly arranged in the respective interval slots to form m-phase symmetrical windings. The axis of the windings of the first winding group The axes of the corresponding windings of the second winding group are staggered by a space angle of 180°+θ or 180°-θ along the circumferential direction of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More