

Device and method for realizing real-time positioning and mapping
A real-time positioning and pose technology, applied in 3D modeling, image enhancement, image analysis, etc., can solve the problems of tracking accuracy decline, achieve the effects of reducing cumulative errors, improving positioning accuracy, and improving computing efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] In order to enable those skilled in the art to better understand the present invention, exemplary embodiments of the present invention will be described in further detail below in conjunction with the accompanying drawings and specific implementation methods.
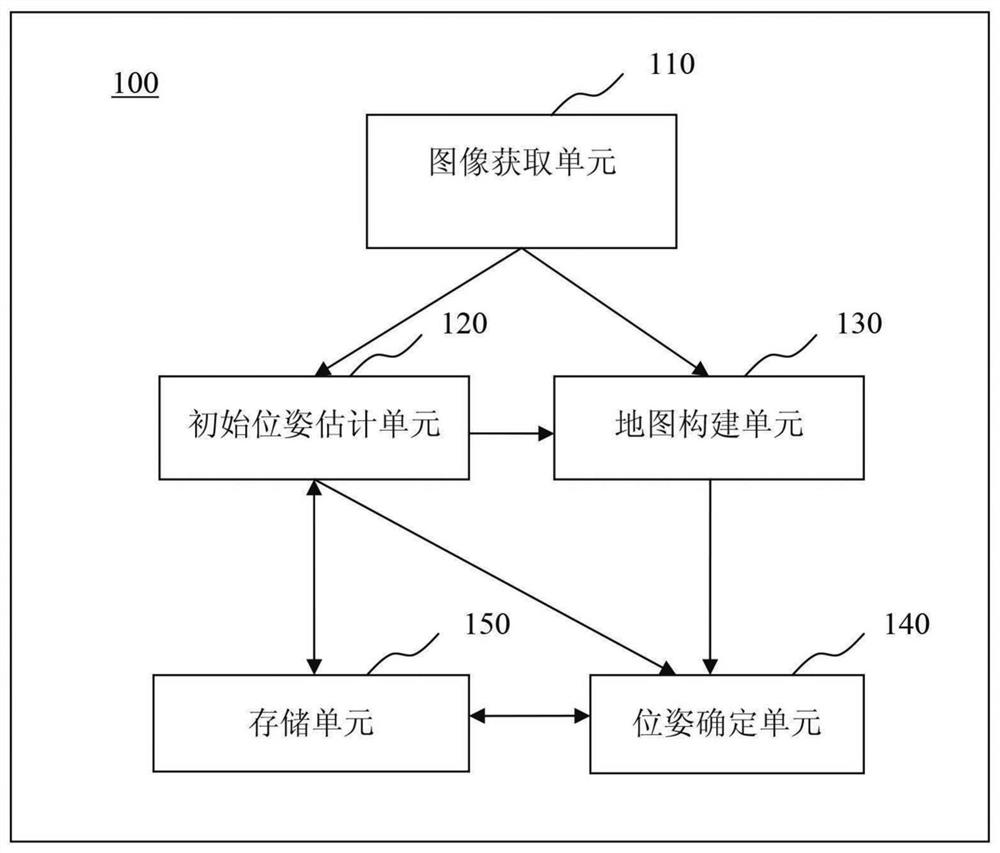
[0050] figure 1 is a block diagram illustrating a SLAM system 100 based on map reconstruction according to an exemplary embodiment of the present invention.
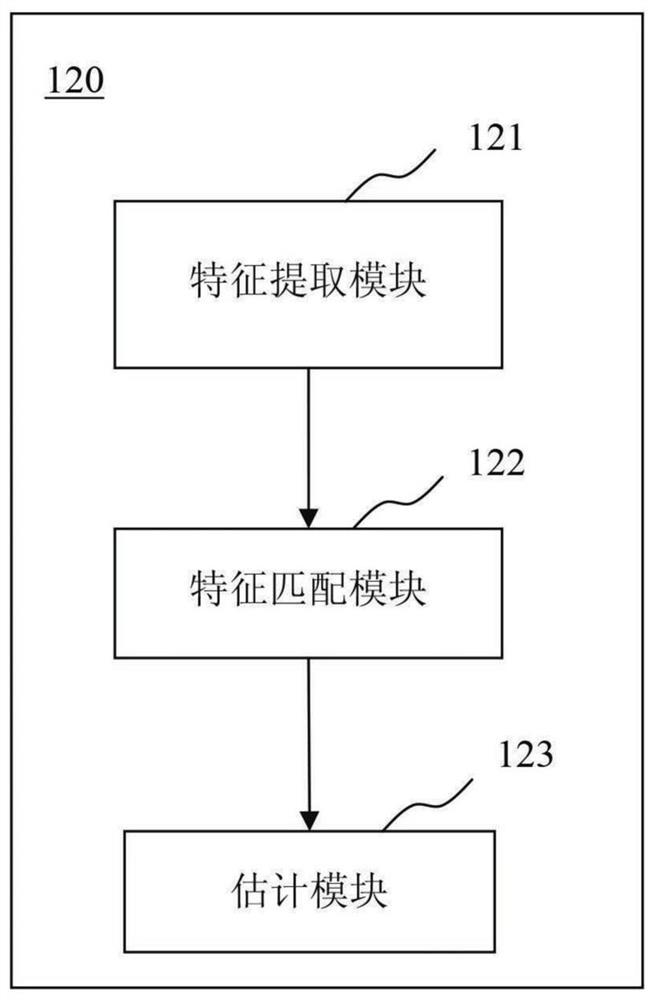
[0051] refer to figure 1 The SLAM system 100 based on map reconstruction (hereinafter referred to as "SLAM system 100") includes an image acquisition unit 110, an initial pose estimation unit 120, a map construction unit 130, a pose determination unit 140, and a storage unit 150.
[0052] The image acquiring unit 110 can acquire the color image and the depth image of the surrounding environment where the SLAM system 100 is currently located as the color image and the depth image of the current frame to be processed. In addition, the “previous frame” menti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More