Multi-unmanned aerial vehicle cooperative search method under communication constraint
A search method and multi-UAV technology, applied in the field of UAV control, can solve problems such as affecting UAV information interaction, potential safety hazards, and reduced search efficiency, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
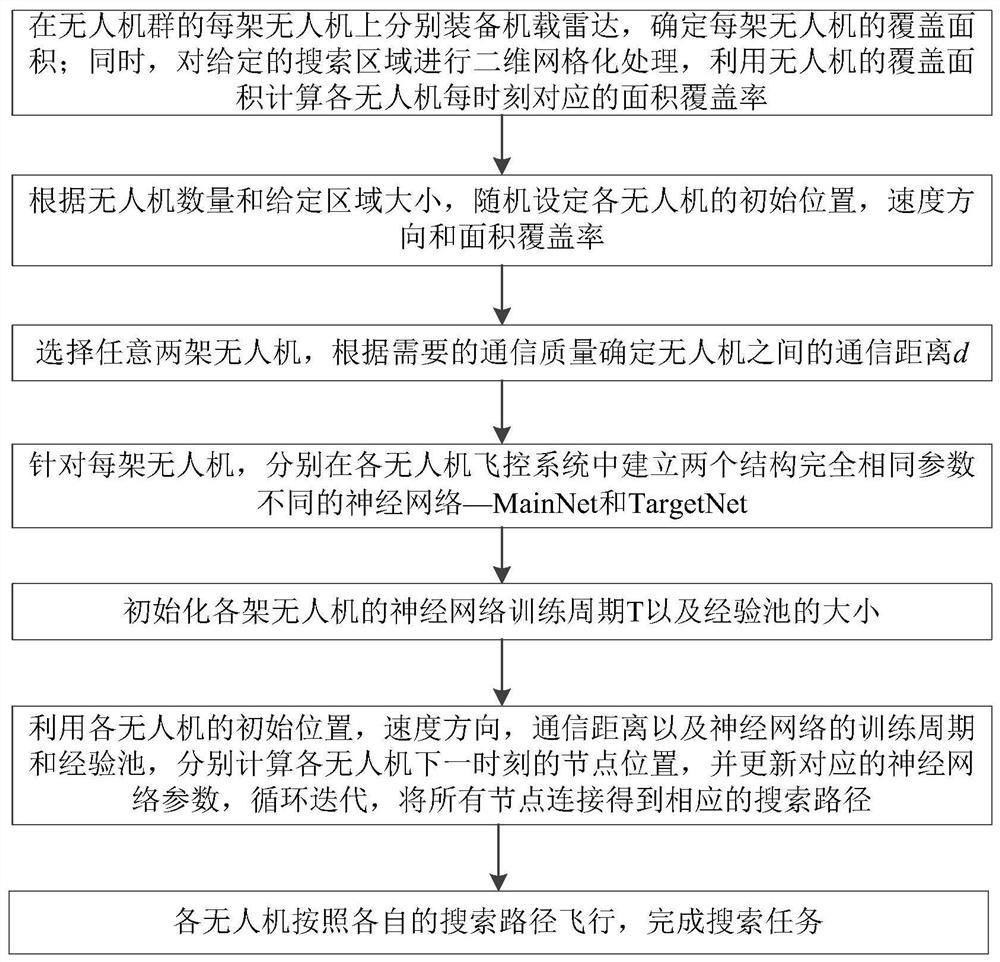
Method used
Image

Examples
Embodiment Construction
[0076] In order to facilitate those of ordinary skill in the art to understand and implement the present invention, the present invention will be further described in detail and in-depth below in conjunction with the accompanying drawings.
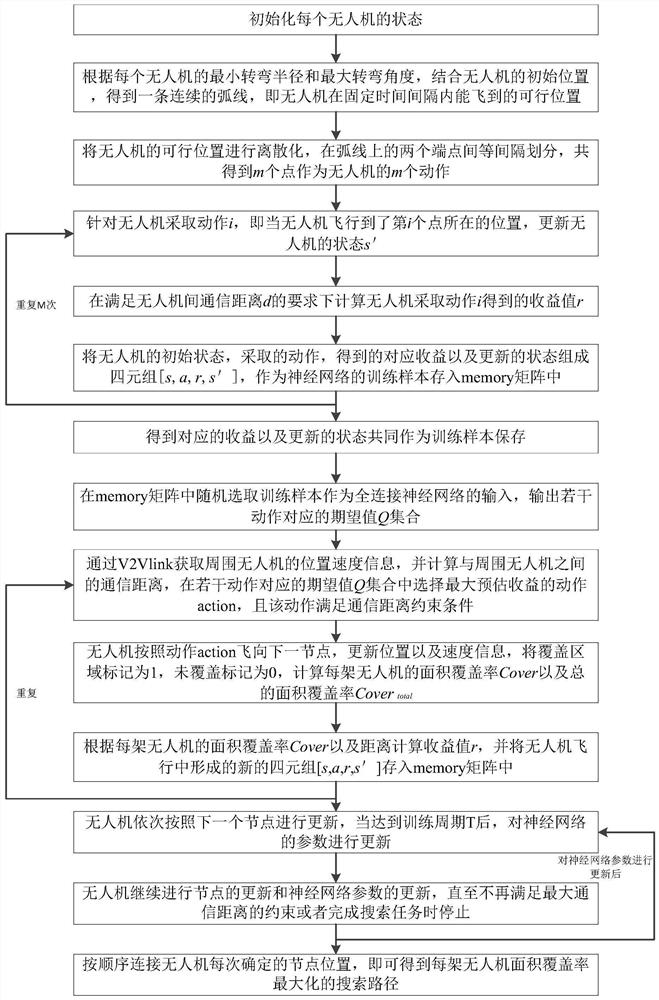
[0077] The reinforcement learning method is a data-based intelligent learning control method that does not require model information. It can collect sample data during the movement of the mobile agent for learning. By interacting with the environment and receiving feedback from the environment, it can be obtained in iterations. Approximate optimal strategy is an effective method to solve the path planning of agents in complex environments.
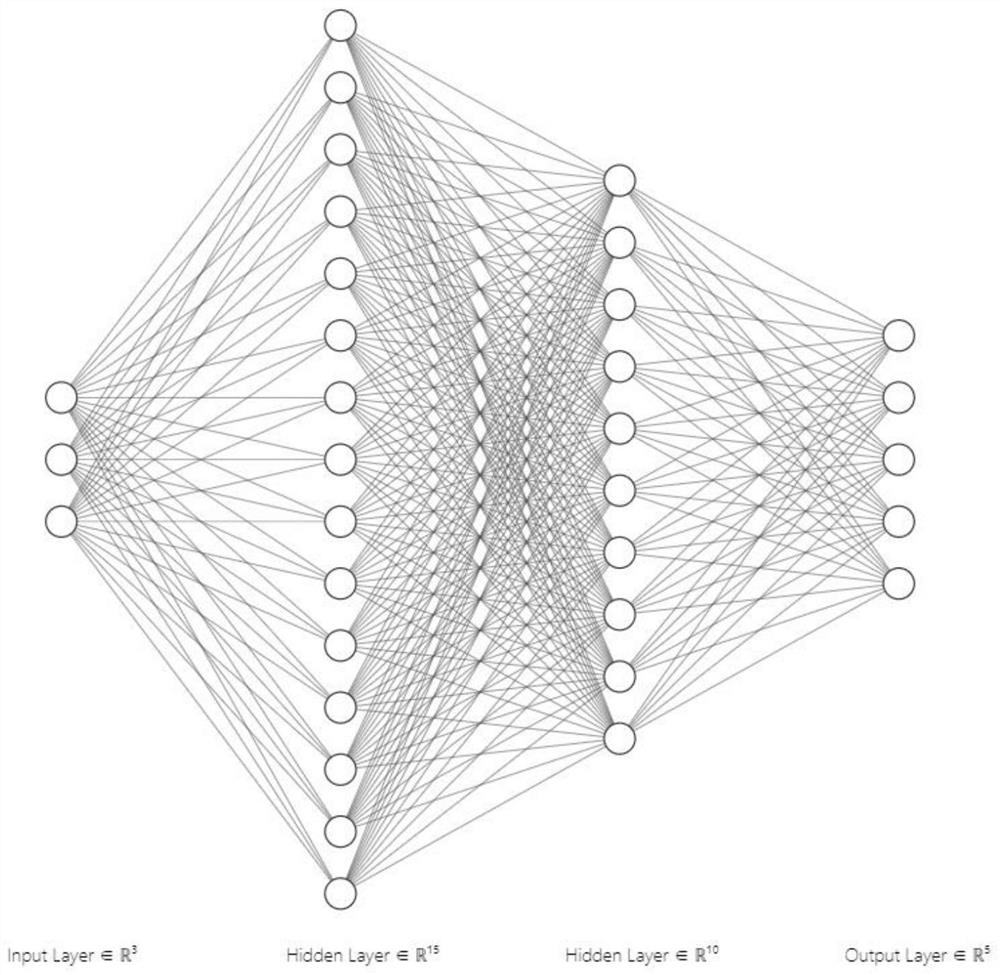
[0078] Deep reinforcement learning is an algorithm that uses neural networks to optimize the agent's strategy. It establishes the mapping between agent states, actions and rewards through neural networks, and also solves the "dimension disaster" problem of traditional reinforcement learning. Trained Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com