

Speed inverse solution method for six-axis robot and six-axis robot
A six-axis robot, speed technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problem that designers cannot understand the operation mechanism.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
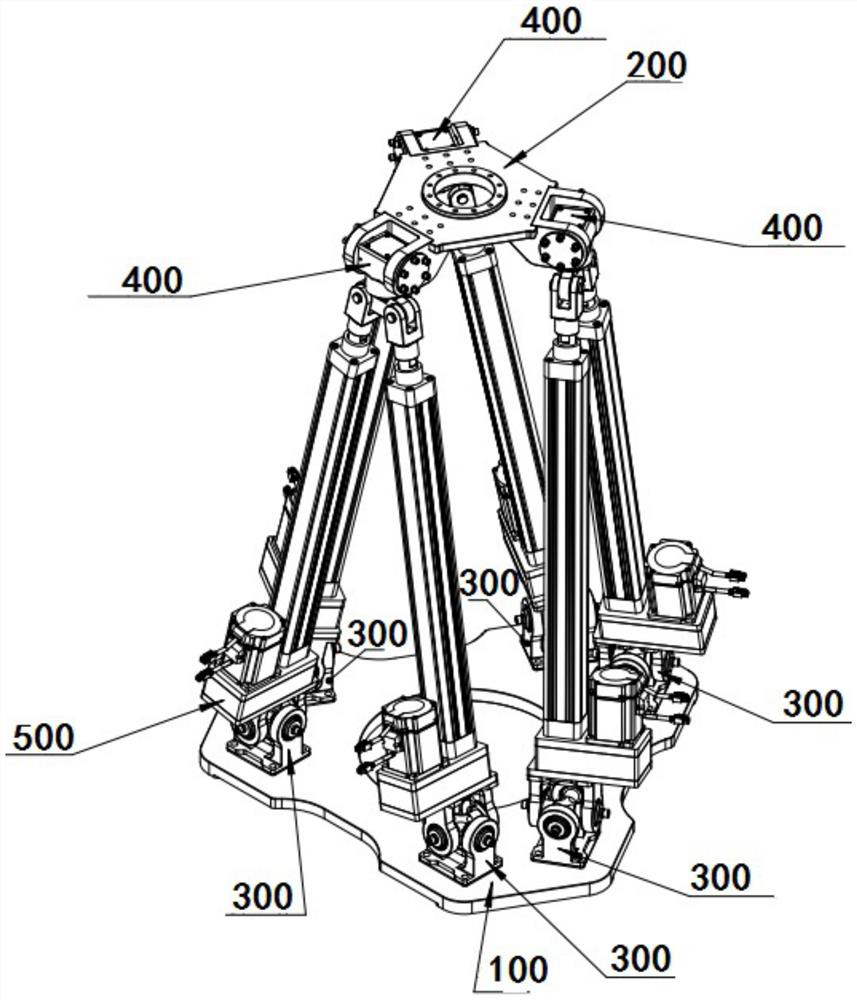
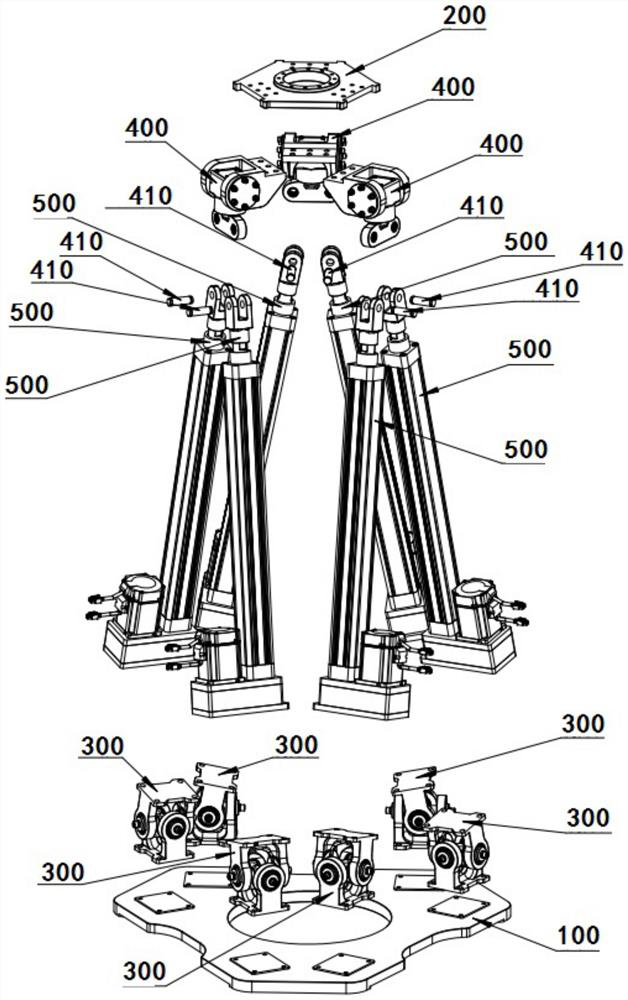
[0065] Aiming at the technical problems in the background technology, the present invention provides a six-axis robot and its inverse solution method and device, see figure 1 and figure 2 , the six-axis robot includes a static platform 100 , a dynamic platform 200 , six Hooke hinge assemblies 300 , three joint assemblies 400 , and six electric cylinder assemblies 500 . Among them, the Hooke hinge assembly is installed on the static platform 100, the joint assembly 400 is installed on the moving platform 200, one end of the electric cylinder assembly 500 is installed on the Hooke hinge assembly 300, and the other end of the electric cylinder assembly 500 passes through the bearing pin 410 is rotatably connected to the joint assembly 400 .
[0066] The configuration of the robot can be considered as the arrangement of the joints, including the joint type, the number of joints and the assembly size parameters. The six-axis robot described in this embodiment can form a 6-3 UPU ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More