

Spherical rescue robot with rolling-jumping function and control method
A rescue robot and robot technology, applied in the field of rescue robots, can solve the problem that spherical robots are difficult to dexterously and smoothly climb stairs, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The embodiments of the present invention will be described in detail in conjunction with the drawings and technical solutions.
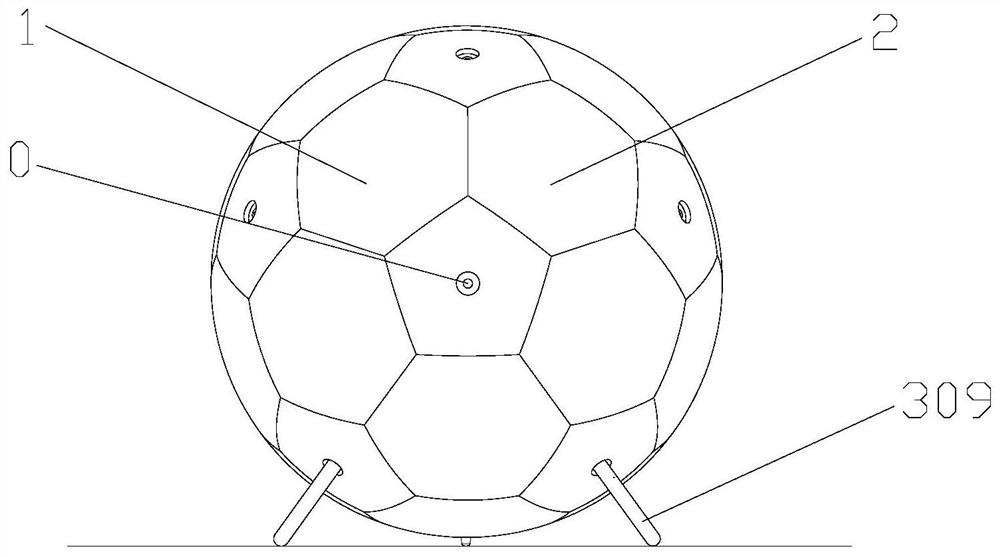
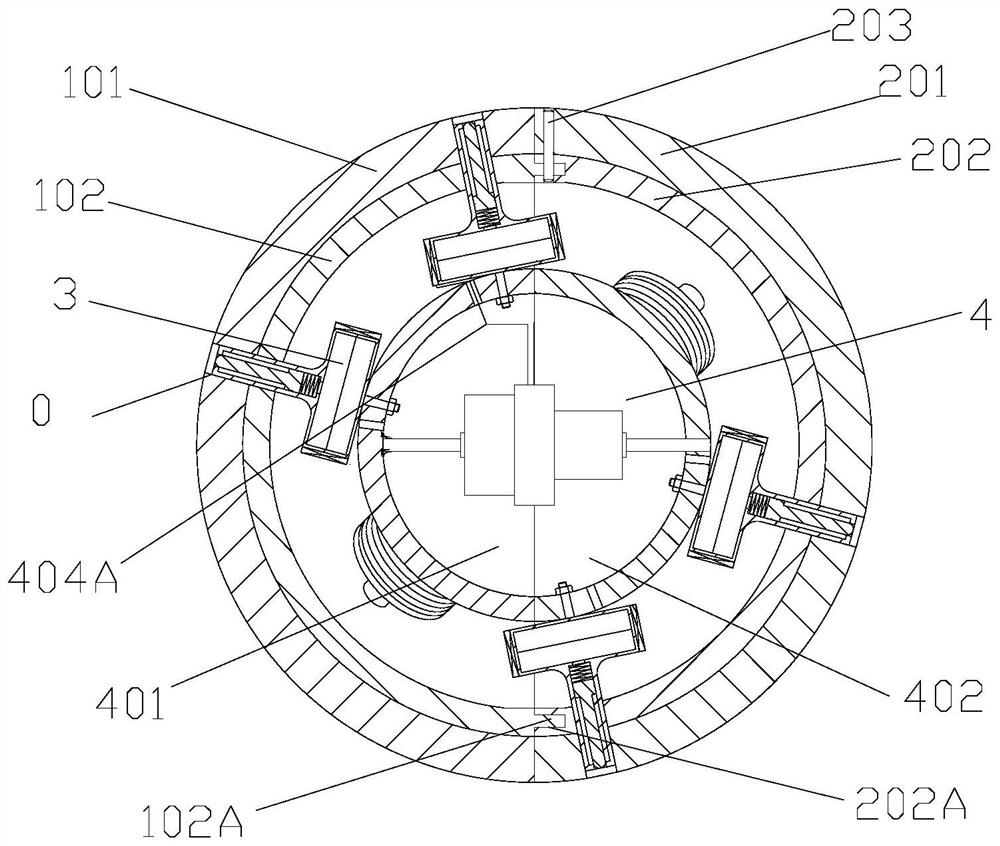
[0021] figure 1 It is a schematic diagram of the stable state of the spherical robot of the present invention, figure 2It is a structural sectional view of the spherical robot of the present invention. A spherical rescue robot with roll-jump capability consists of a left hemisphere 1 and a right hemisphere 2 , a magneto-rheological thrust mechanism 3 and a central control cabin 4 . Wherein, the left hemisphere 1 is composed of a left rubber layer 101 and a left base layer 102 , and the right hemisphere 2 is composed of a right rubber layer 201 and a right base layer 202 . An annular boss 102A is machined on the ring surface of the left base layer 102 connected with the right base layer 202 , and an annular groove 202A is processed on the ring surface of the right base layer 202 connected with the left base layer 102 . In order to ensure th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More