

Spherical rescue robot with roll-jump function and control method
A rescue robot, spherical technology, applied in the field of rescue robots, can solve the problem that spherical robots are difficult to climb stairs smoothly and smoothly, and achieve the effect of solving the problem of multi-group cooperative roll-jump drive, reducing motion energy consumption, and strong environmental adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The embodiments of the present invention will be described in detail in conjunction with the drawings and technical solutions.
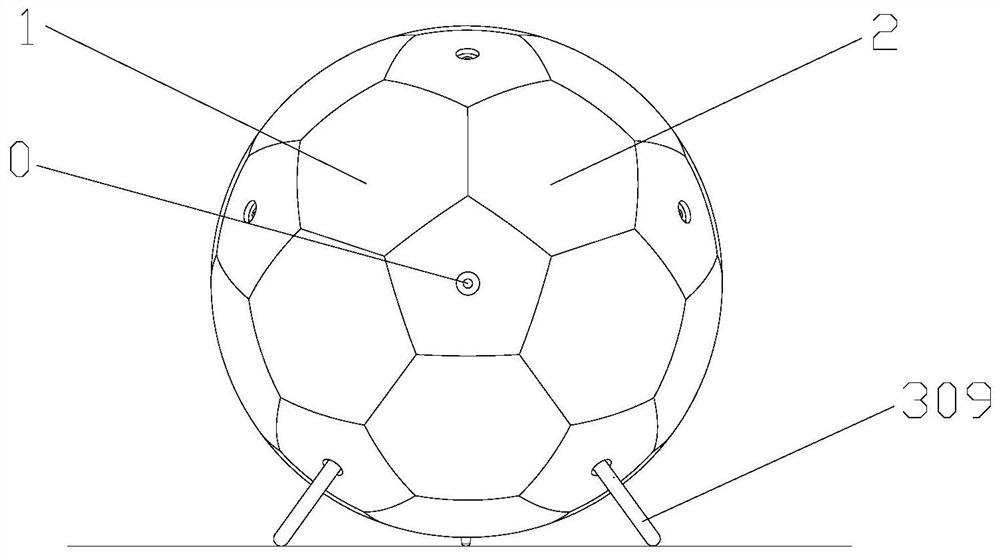
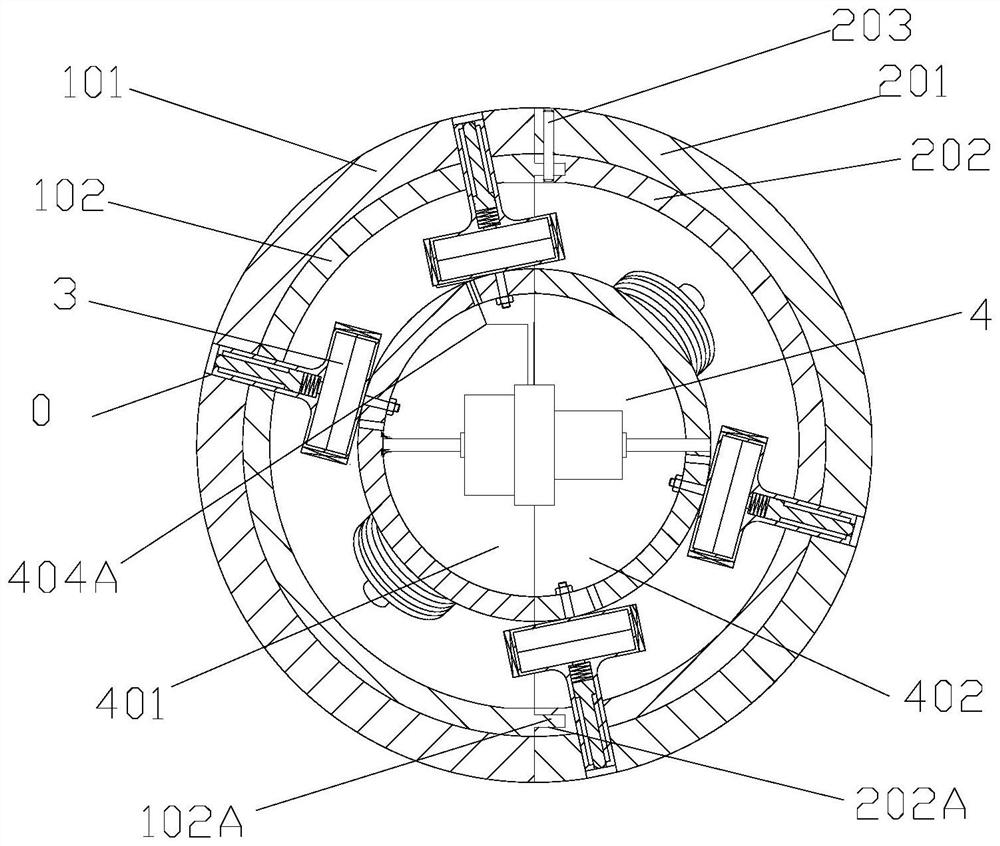
[0021] figure 1 It is a schematic diagram of the stable state of the spherical robot of the present invention, figure 2It is a structural sectional view of the spherical robot of the present invention. A spherical rescue robot with roll-jump capability consists of a left hemisphere 1 and a right hemisphere 2 , a magneto-rheological thrust mechanism 3 and a central control cabin 4 . Wherein, the left hemisphere 1 is composed of a left rubber layer 101 and a left base layer 102 , and the right hemisphere 2 is composed of a right rubber layer 201 and a right base layer 202 . An annular boss 102A is machined on the ring surface of the left base layer 102 connected with the right base layer 202 , and an annular groove 202A is processed on the ring surface of the right base layer 202 connected with the left base layer 102 . In order to ensure th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More