Solid-state body positioning method based on time domain measurement in non-line-of-sight environment
A technology of time-domain measurement and positioning method, which is applied in the field of communication, can solve problems such as the influence of positioning accuracy of unstudied solid objects, and achieve the effect of simple method, strong robustness and accurate positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
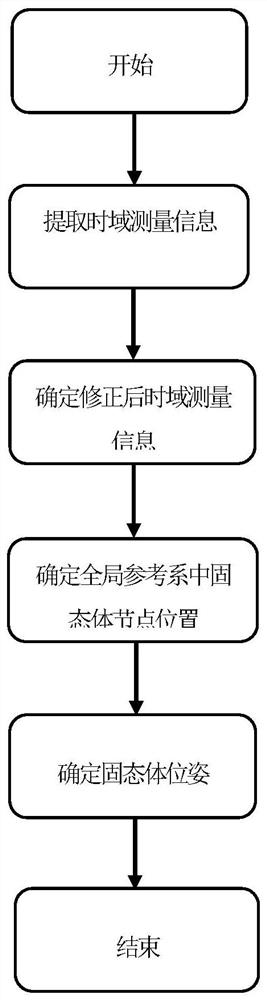
[0065] The solid-state positioning method based on time-domain measurement in the non-line-of-sight environment of this embodiment consists of the following steps:
[0066] (1) Extract time domain measurement information
[0067] According to the following solid-state positioning model in the non-line-of-sight transmission environment, the time-domain measurement information r of the solid-state node transmitting signals to the anchor node is extracted mi :
[0068] r mi =||s i -a m ||+v mi +b mi (1)
[0069] where s i Indicates the position coordinates of the i-th solid body node in the global reference system, which is [x i ,y i ,z i ] T , i takes the value 1,2,...,N; a m Indicates the position coordinates of the mth anchor node deployed in the surrounding environment, which is [x m ,y m ,z m ] T , the value of m is 1, 2,..., M; N is the number of solid nodes, M is the number of anchor nodes, M, N are finite positive integers, and M≥4, N≥3, this implementati...
Embodiment 2
[0114] The solid-state positioning method based on time-domain measurement in the non-line-of-sight environment of this embodiment consists of the following steps:
[0115] (1) Extract time domain measurement information
[0116] According to the following solid-state positioning model in the non-line-of-sight transmission environment, the time-domain measurement information r of the solid-state node transmitting signals to the anchor node is extracted mi :
[0117] r mi =||s i -a m ||+v mi +b mi (1)
[0118] where s i Indicates the position coordinates of the i-th solid body node in the global reference system, which is [x i ,y i ,z i ] T , i takes the value 1,2,...,N; a m Indicates the position coordinates of the mth anchor node deployed in the surrounding environment, which is [x m ,y m ,z m ] T , the value of m is 1, 2,..., M; N is the number of solid nodes, M is the number of anchor nodes, M, N are finite positive integers, and M≥4, N≥3, this implementati...
Embodiment 3
[0121] The solid-state positioning method based on time-domain measurement in the non-line-of-sight environment of this embodiment consists of the following steps:
[0122] (1) Extract time domain measurement information
[0123] According to the following solid-state positioning model in the non-line-of-sight transmission environment, the time-domain measurement information r of the solid-state node transmitting signals to the anchor node is extracted mi :
[0124] r mi =||s i -a m ||+v mi +b mi (1)
[0125] where s i Indicates the position coordinates of the i-th solid body node in the global reference system, which is [x i ,y i ,z i ] T , i takes the value 1,2,...,N; a m Indicates the position coordinates of the mth anchor node deployed in the surrounding environment, which is [x m ,y m ,z m ] T , the value of m is 1, 2,..., M; N is the number of solid nodes, M is the number of anchor nodes, M, N are finite positive integers, and M≥4, N≥3, this implementati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com