

Path control method for intelligent harvesting robot considering time delay and environmental constraints
A path control and harvester technology, which is applied in two-dimensional position/course control, vehicle position/route/height control, control/regulation system, etc., can solve the problem of high computing cost and ensure dynamic performance and steady-state performance Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0078] The present invention will be further clarified below with reference to the accompanying drawings and specific embodiments. It should be understood that the following specific embodiments are only used to illustrate the present invention and not to limit the scope of the present invention.
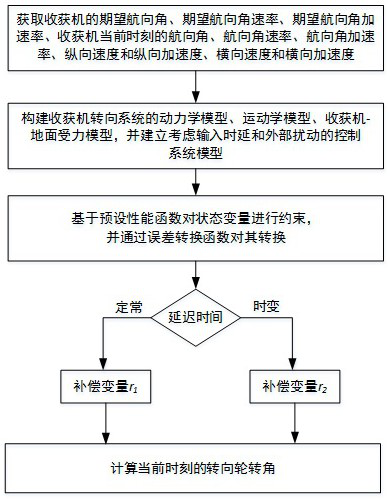
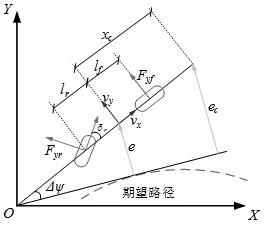
[0079] In order to compensate the influence of input time delay and external disturbance on the path tracking control system of the harvester, the present invention proposes a path control method for an intelligent harvesting robot considering time delay and environmental constraints. Models based on harvester path tracking (such as figure 2 shown), establish the dynamics model, kinematic model, harvester-ground force model of the harvester steering system, and construct a control system model considering input delay and external disturbance, taking the comprehensive error as the state variable; based on the preset performance The function constrains the state variables, and conver...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More