

Robot high-precision assembling method based on visual servo
A technology of visual servoing and assembly method, applied in the directions of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of positioning deviation and inaccuracy, and achieve the effect of remarkable effect and avoiding errors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals designate the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary and are intended to explain the present invention and should not be construed as limiting the present invention.
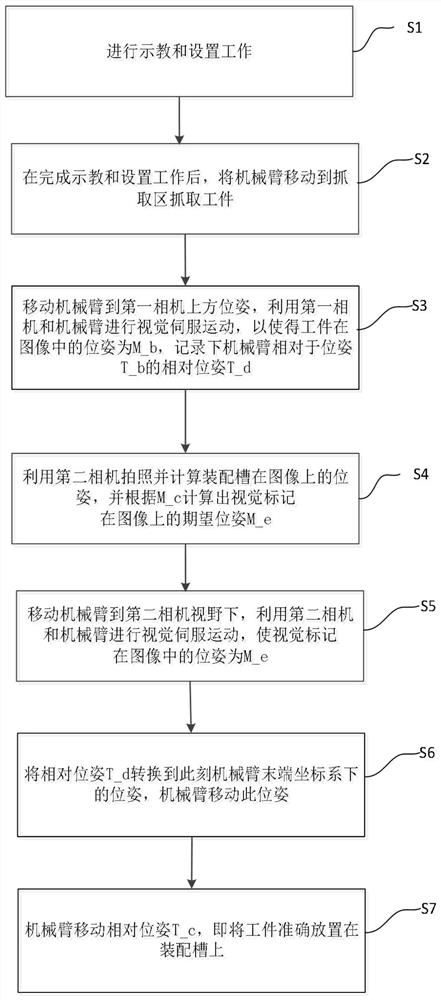
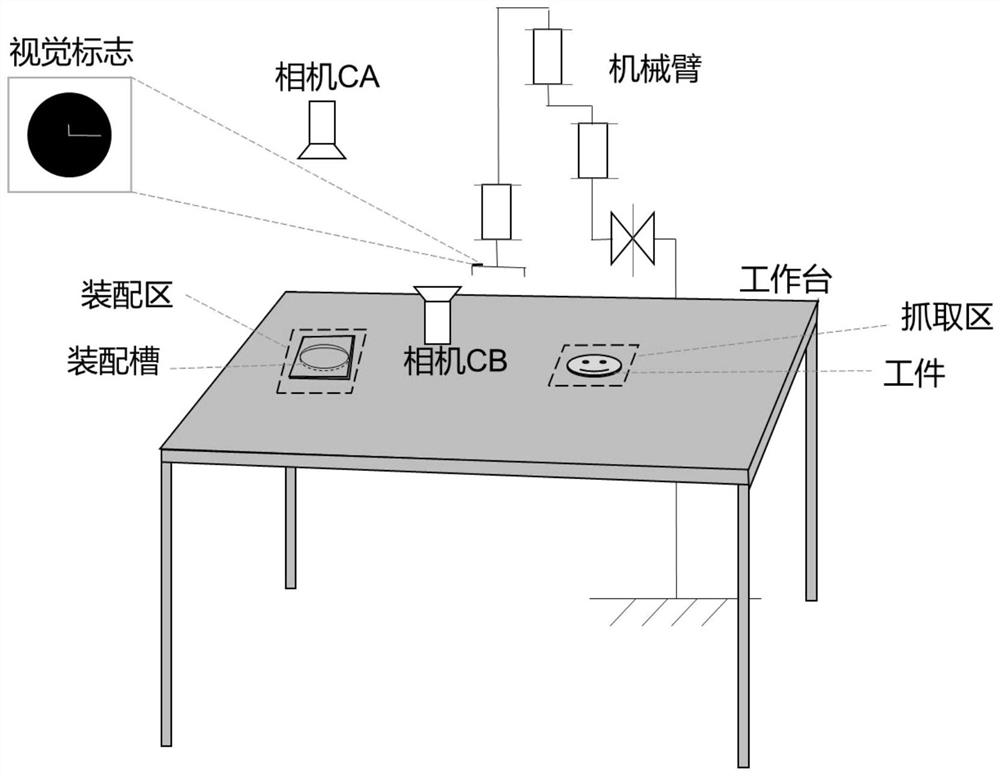
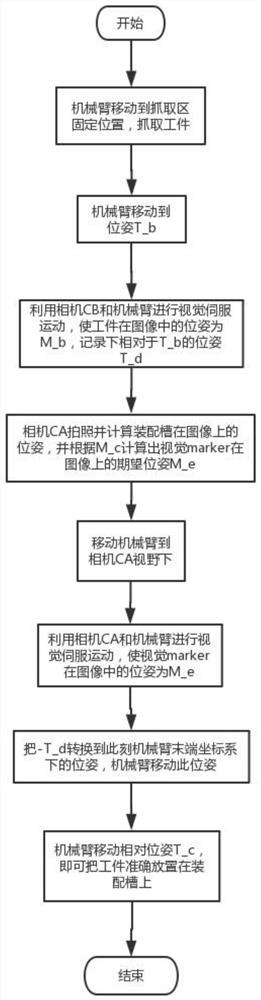
[0039] The present invention proposes a high-precision robot assembly method based on visual servoing. The following hardware devices are used in the method: workbench, second camera CA, first camera CB, industrial computer, mechanical arm, workpiece and assembly groove, and visual marks. like figure 2 As shown, the workbench is a plane. One of the areas holds the workpieces to be assembled; the other holds the assembly slots. The robotic arm needs to accurately place the workpiece to be assembled in the assembly slot.
[004...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More