

Mobile robot path planning and optimizing method based on cost potential field
A mobile robot and path planning technology, applied in the field of mobile robots, to achieve the effects of high practical value, high smoothness, and high obstacle avoidance safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0080] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
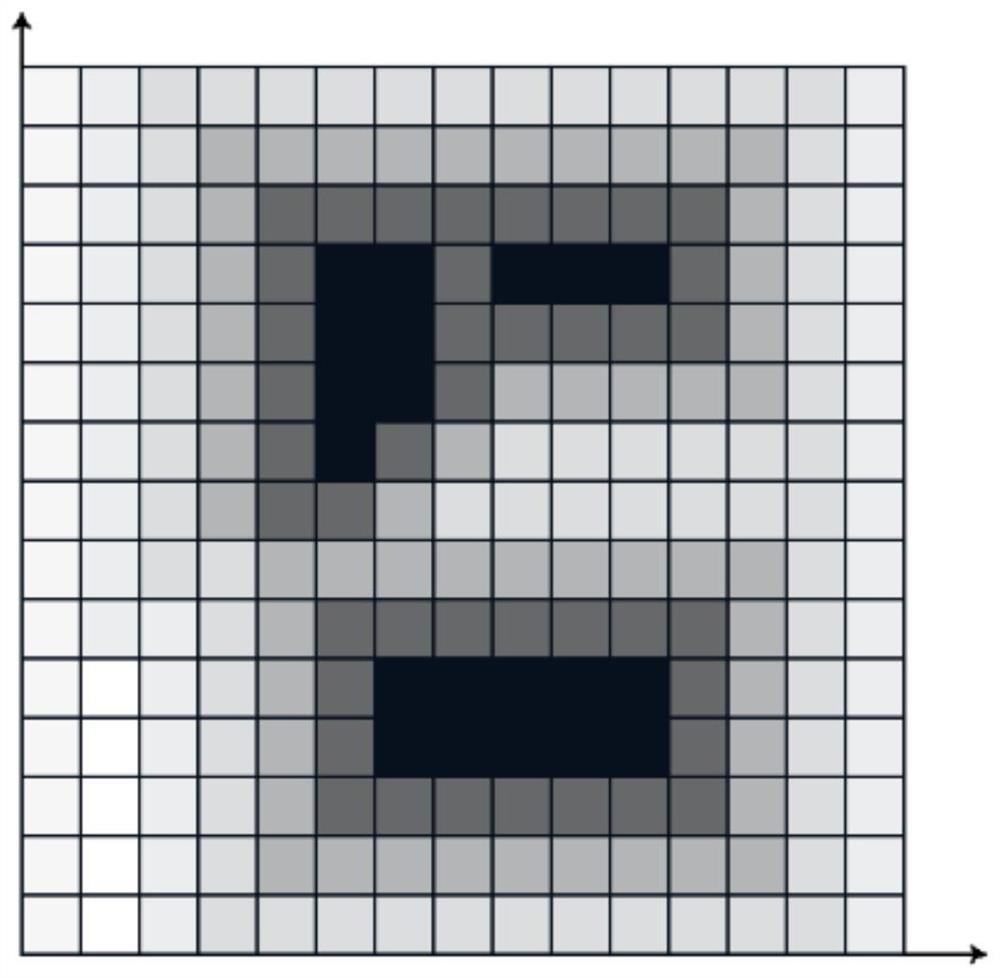
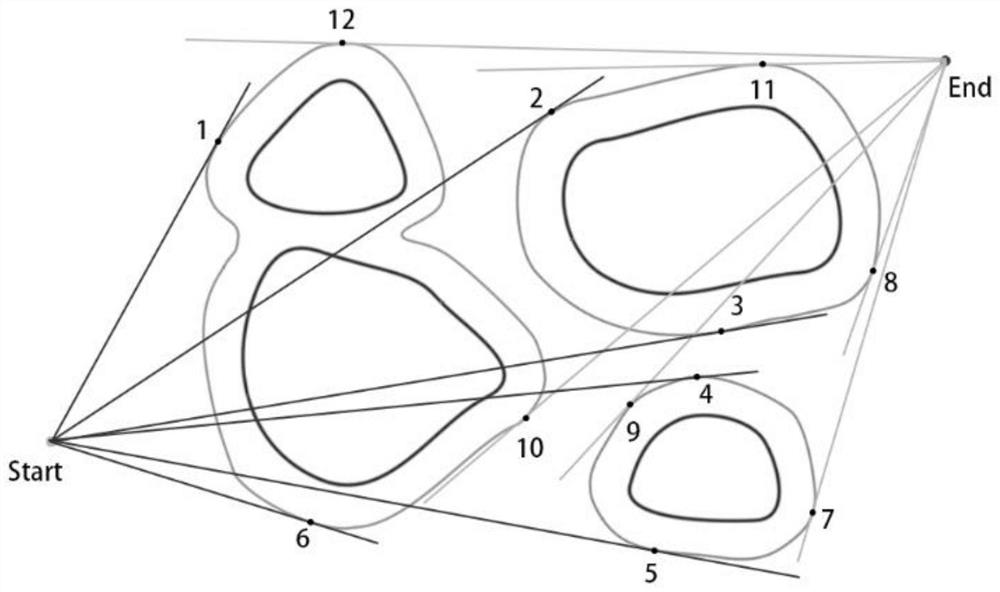
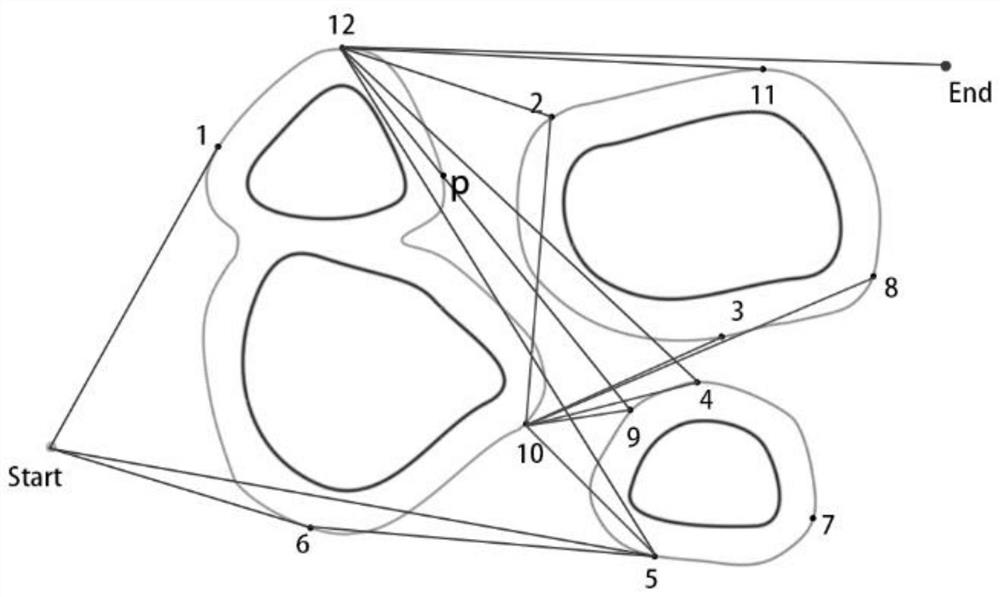
[0081] Such as Figure 1-9 As shown, in a specific embodiment, the present invention proposes a mobile robot path planning and optimization method based on cost potential field, including the construction of initial grid map and dynamic obstacle grid map, static obstacle cost potential field And the construction of the dynamic obstacle cost potential field that introduces the obstacle moving speed, the optimal cost candidate path generation based on the minimum spanning tree, and the path smoothing and optimization based on the obstacle cost and path length cost under the dynamic cost potential field.
[0082]In the specific implementation manner, the two-dimensional grid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More