

Automatic planning method for intelligent spraying path of ship outer plate based on unmanned aerial vehicle
An automatic planning, unmanned aerial vehicle technology, applied in the direction of manipulator, spray device, program-controlled manipulator, etc., can solve the problem of inability to play no track rolling, reduce the quality of UAV spraying, resource utilization, operation efficiency and intelligence level , can not be well adapted to complex surfaces and other problems, to achieve the effect of rapid generation and improvement of spraying quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
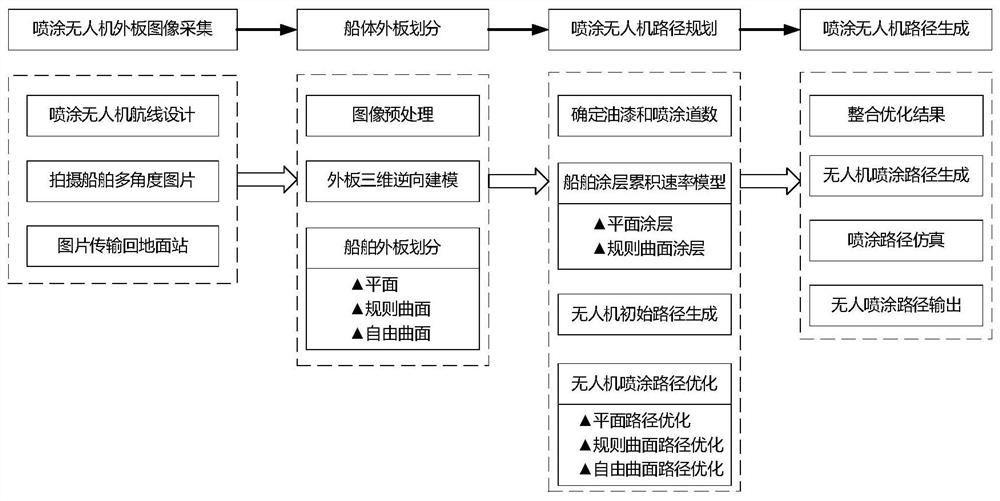
[0062] A method for automatic planning of an intelligent spraying path for a ship's outer plate based on an unmanned aerial vehicle according to the present invention comprises the following steps:
[0063] (1) Use the ship's outer plate spraying drone to collect images of the ship's outer plate;
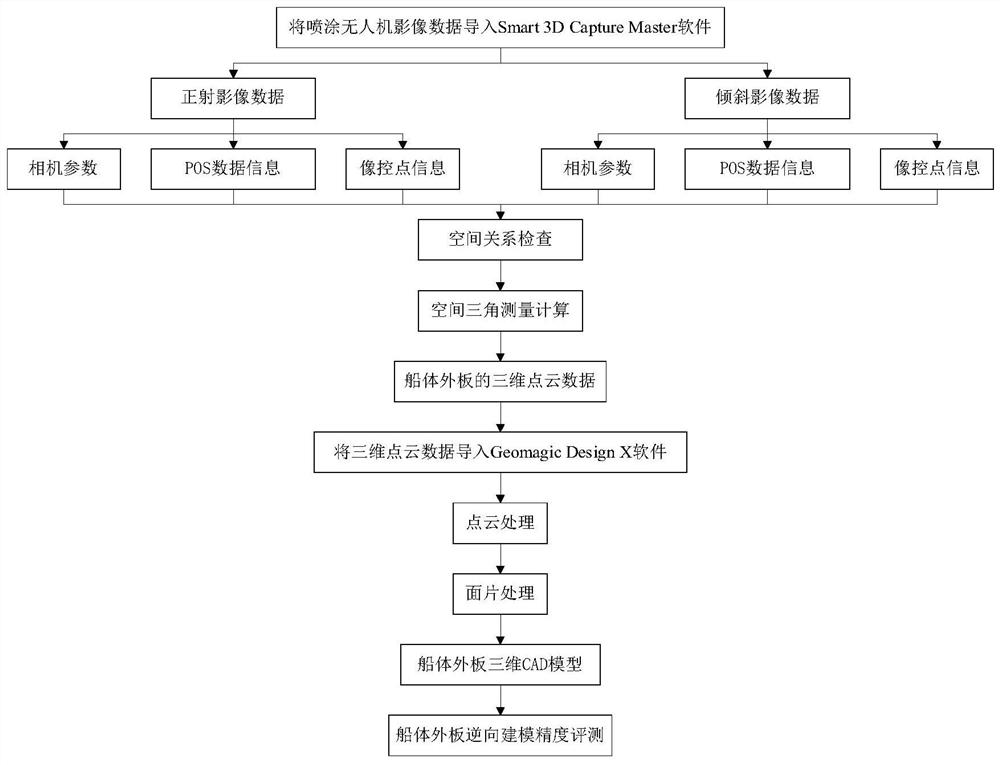
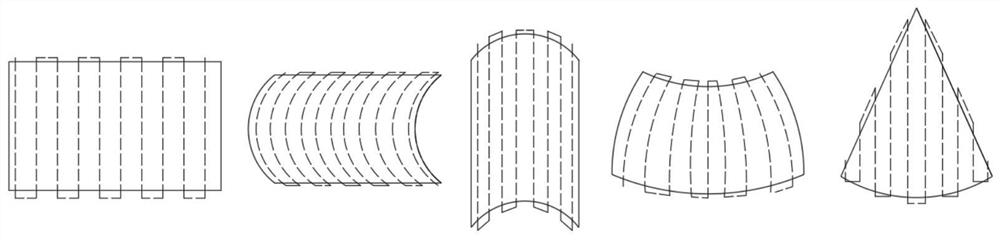
[0064](2) Carry out three-dimensional reverse modeling of the outer plate based on the image collected in step (1), and divide the model of the outer plate of the ship according to the degree of regularity of the shape, and divide the outer plate of the ship into plane, regular curved surface and complex curved surface;
[0065] (3) Plan the number of flights of the spraying drone and the spraying path for the plane, the regular surface and the complex surface respectively;
[0066] (4) Generate UAV spraying path and UAV operation parameters.
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More