

Multi-degree-of-freedom mechanical arm driving controller
A technology for driving controllers and manipulators, which is applied to manipulators, program-controlled manipulators, and manufacturing tools. It can solve the problems of complex system design process, short system implementation cycle, and low area performance, and achieve flexible data rewriting and simplified design. The effect of increasing the workload
Pending Publication Date: 2021-06-08
武汉精锋微控科技有限公司
View PDF0 Cites 0 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0004] ASIC processors have high performance, but the system design process is complex and development efficiency is low; FPGA performance per unit area is relatively low, but the system implementation cycle is short, and the development and verification efficiency is higher. Most of the integrated drive and control systems use ARM+DSP+FPGA distributed structure
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
[0103]The present invention takes a mechanical arm with 6 degrees of freedom as an example, and decibels in each dimension represent the state of one joint.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
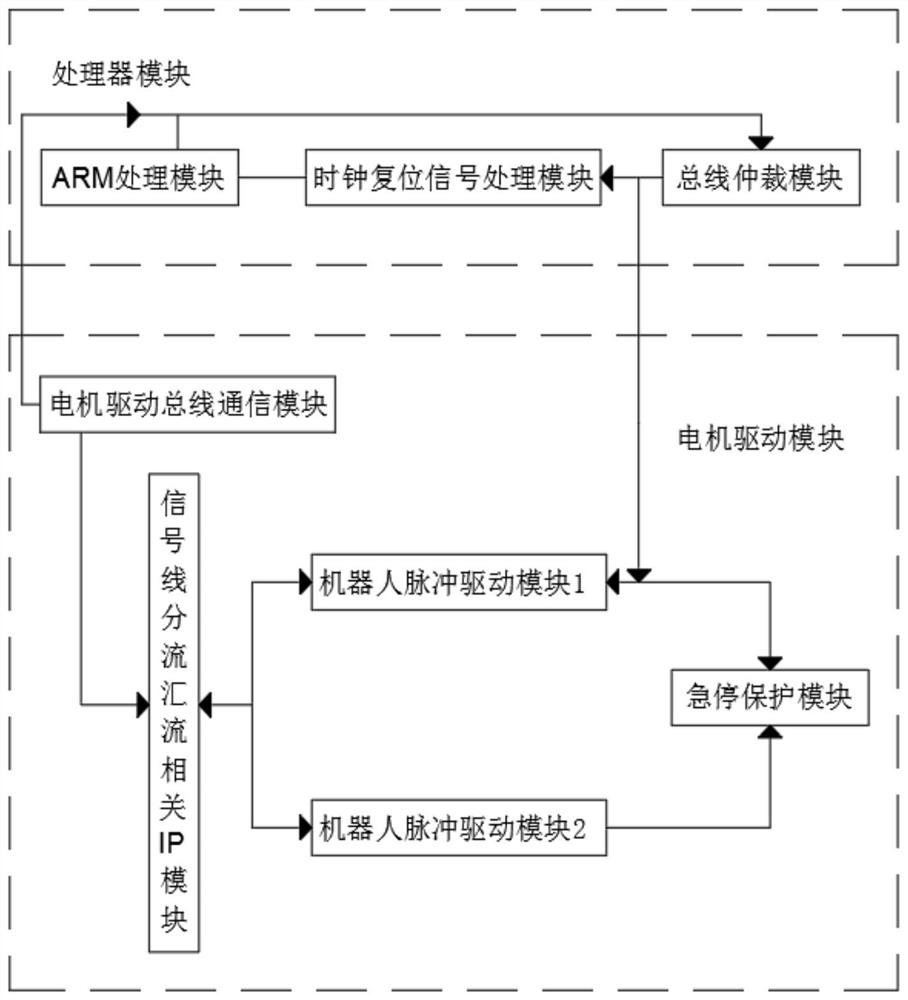
The invention discloses a multi-degree-of-freedom mechanical arm driving controller, and relates to the technical field of mechanical arm control systems. The multi-degree-of-freedom mechanical arm driving controller comprises a processor module and a motor driving module, the processor module comprises an ARM processing module, a clock reset signal processing module and a bus arbitration module, the ARM processing module is electrically connected with the clock reset signal processing module, the clock reset signal processing module is electrically connected with the bus arbitration module, and the bus arbitration module is connected with the motor driving module; and the motor driving module comprises a motor driving bus communication module, a signal line shunting and converging related IP module, a robot pulse driving module 1, a robot pulse driving module 2 and an emergency stop protection module, and the motor driving bus communication module is electrically connected with the signal shunting and converging related IP module. According to the multi-degree-of-freedom mechanical arm driving controller, the IP is driven based on the stepping motor of a FPGA, and driving and control integration is achieved.
Description
technical field [0001] The invention belongs to the technical field of mechanical arm control systems, and in particular relates to a multi-degree-of-freedom mechanical arm drive controller. Background technique [0002] The integrated drive and control system has gained widespread attention due to its advantages of small size, flexible deployment, and low cost. A drive-control integrated system requires resources such as high-performance calculators, high-speed information exchange, sufficient storage space, and rich peripheral interfaces. The choice of core processor is the focus of system design. The embedded system has become the first choice for the integrated drive and control system due to its convenient development, strong scalability, and high real-time performance; the MCU has a low main frequency and poor data processing capabilities, and is not suitable for systems with high computing performance requirements. DSP By adding multipliers and optimizing the memory...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityApplications(China)
IPC IPC(8): B25J13/00B25J9/16
CPCB25J9/16B25J9/161B25J13/00
Inventor顾强胡春旭
Owner武汉精锋微控科技有限公司