

Industrial robot space pose precision test system
An industrial robot, precision testing technology, applied in manipulators, manufacturing tools, etc., can solve the problems of inability to measure the spatial attitude accuracy of the robot end, inability to fully evaluate the robot accuracy index, five-point test evaluation test system, etc., to achieve measurement efficiency. High, simple structure, low cost effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be described in further detail below in conjunction with the accompanying drawings.
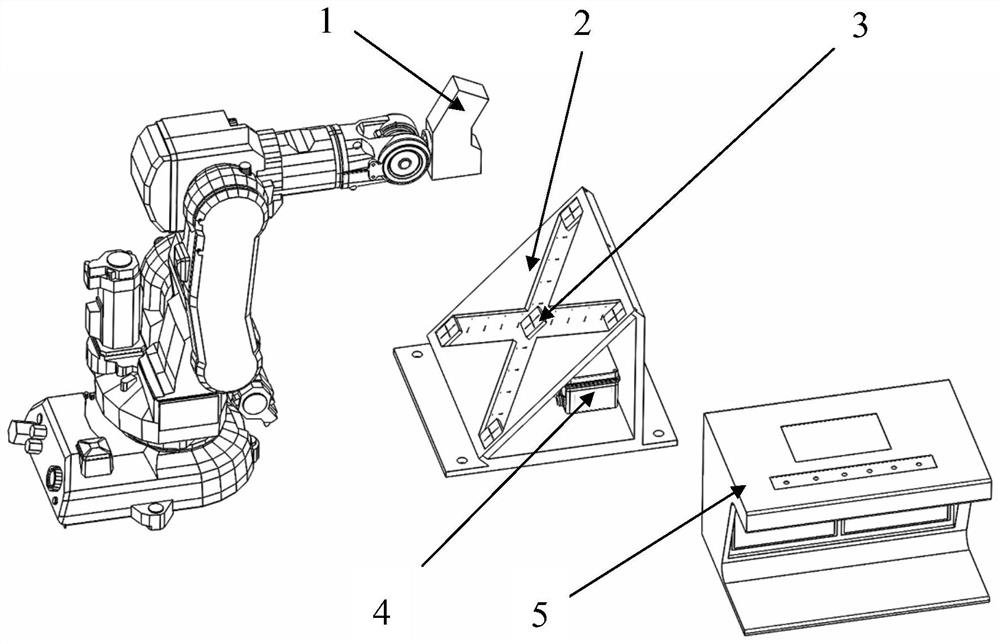
[0022] The invention provides an industrial robot space pose accuracy test system, such as figure 1 shown. The test system includes a pose measurement cube assembly 2, a measurement target 3, a visual sensor 1 and a power supply module 4; the visual sensor 1 is fixed at the end of an industrial robot, and the visual sensor 1 is connected to a terminal controller through a transmission cable, and the terminal control The device is fixed on the console 5. The pose measurement cube assembly 2 is placed in the measurement area of the vision sensor, and the pose measurement cube assembly includes an X-shaped groove 7, and the measurement target 3 is installed in the X-shaped groove.
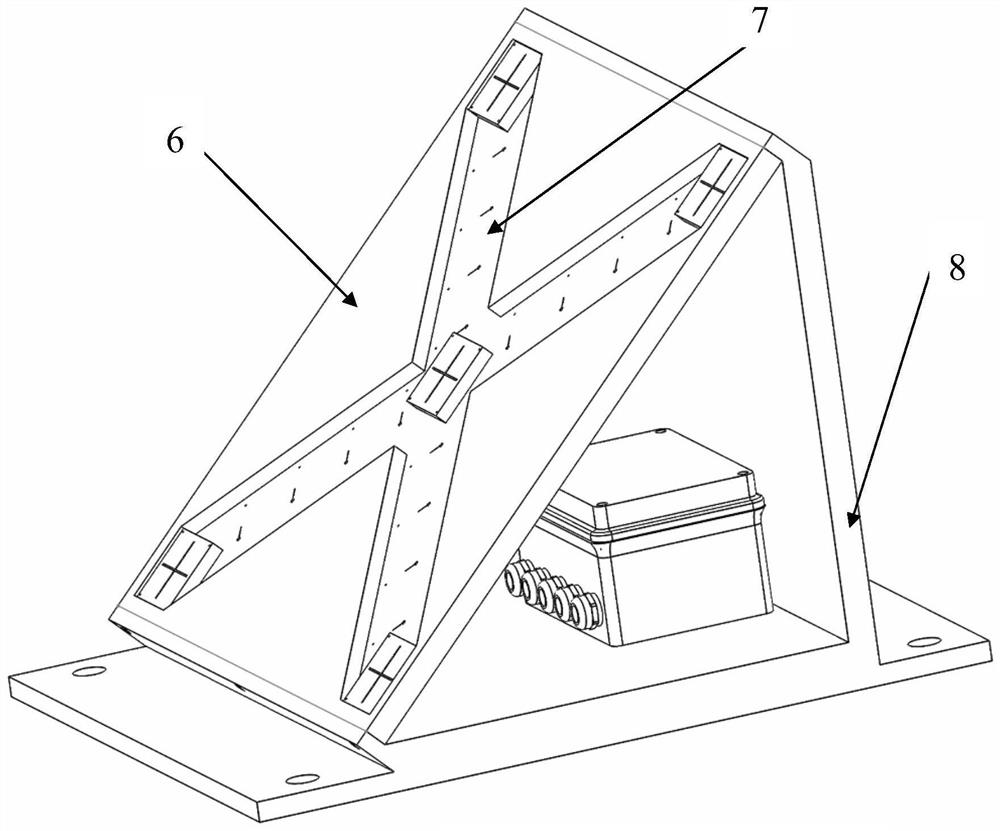
[0023] The pose measurement cube assembly includes a standard test board 6, an X-shaped groove 7 and a mounting bracket 8, the X-shaped groove is opened on the outer surface of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More