Telescopic four-claw type vehicle carrying robot forklift method based on laser
What is AI technical title?
AI technical title is built by PatSnap AI team. It summarizes the technical point description of the patent document.
A technology of vehicle handling and robotics, applied in the field of laser-based retractable four-claw vehicle handling robot forklifts, which can solve problems such as easy collision with tires
Inactive Publication Date: 2021-06-08
JIANGSU LITTLE WHITE RABBIT INTELLIGENT MFG SCI INC
View PDF0 Cites 3 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0004] In view of the above-mentioned technical problems in the prior art, the purpose of the present invention is to design a laser-based scalable four-claw vehicle handling robot for the problem that the existing scalable four-claw vehicle handling robot forklift easily hits the tire forklift method
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
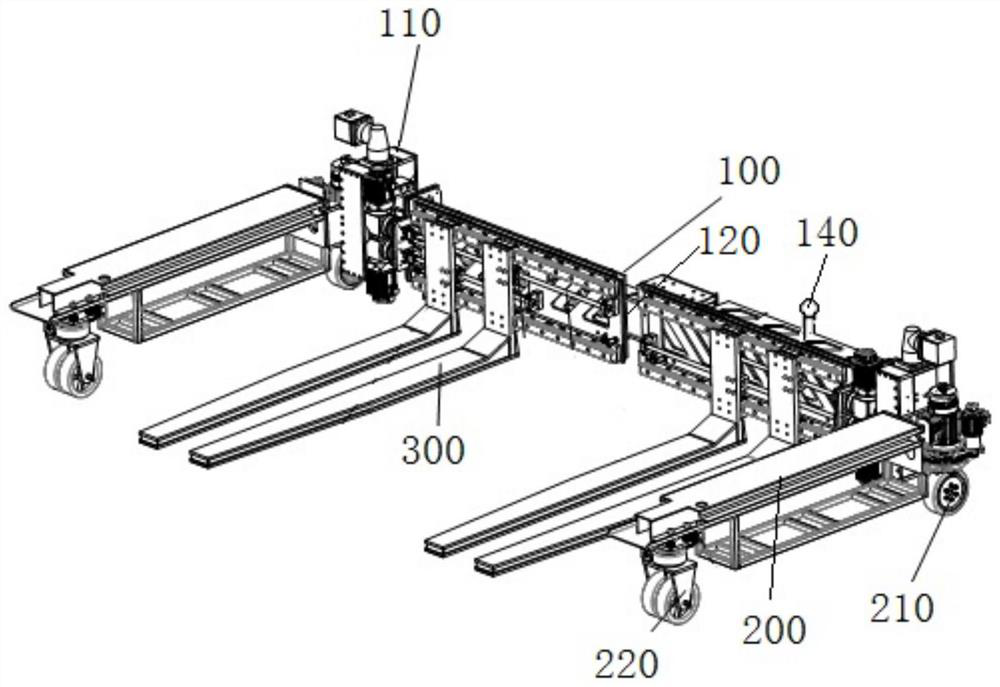
[0033] Such as figure 1 with 2 As shown, the present embodiment relates to a retractable four-claw vehicle handling robot, and the robot includes:
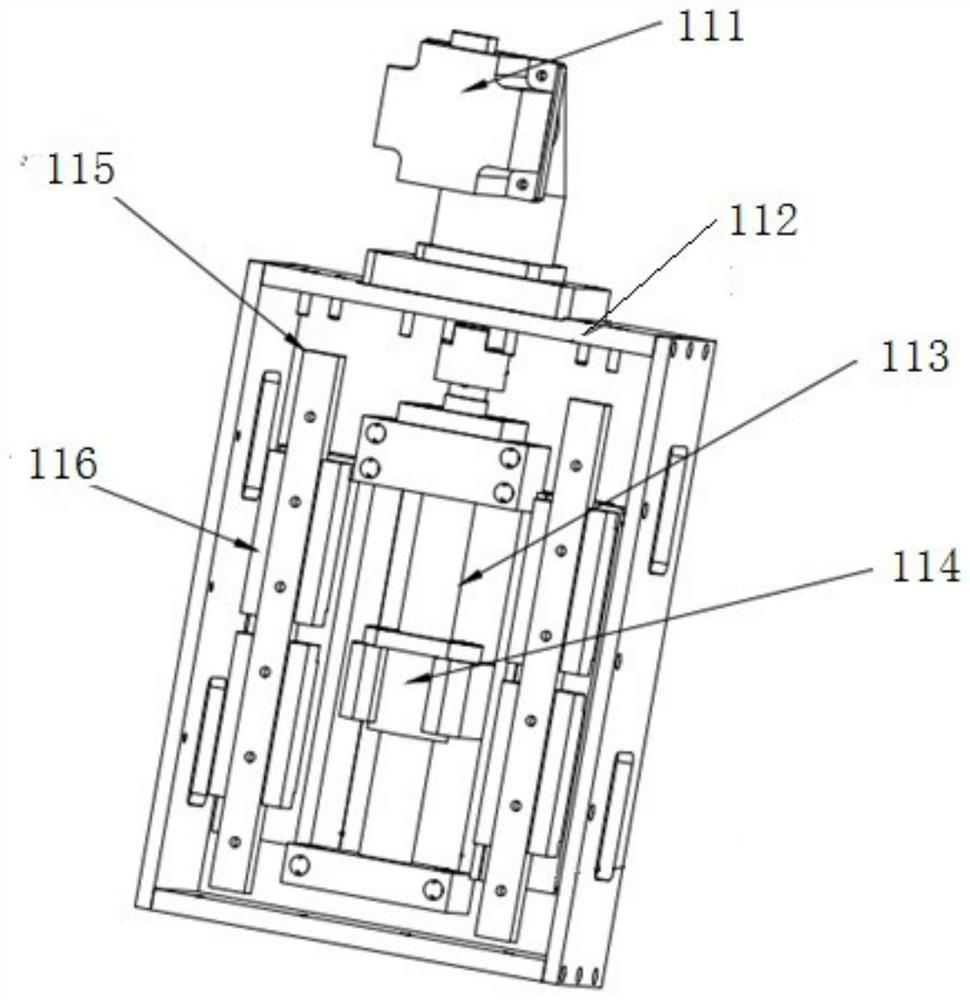
[0034] A crossbeam 100, the crossbeam 100 is an inline structure, a length adjustment structure 120 is provided in the middle, and a laser radar scanner 140 is installed above the crossbeam;
[0035] Two longitudinal beams 200, one end of each longitudinal beam 200 is equipped with a steering wheel 210, and the other end is equipped with a universal wheel 220, and one end where the steering wheel 210 is installed and one end of the beam 100 are connected together through the lifting structure 110;
[0036] Four yokes 300, including two pairs of yokes 300 with the same symmetrical structure, and the two pairs of yokes 300 are respectively movably installed on the left and right sides of the beam 100 on the same side as the longitudinal beam 200;
[0037] The two ends of the length adjusting structure 120 are respectively slidably...
Embodiment 2
[0041] This embodiment relates to a laser-based four-claw type laser-based retractable four-claw vehicle handling robot forklift method in Embodiment 1, the method comprising:
[0042] S1: The vehicle handling robot drives to one side of the vehicle and makes its beam parallel to the direction of the vehicle;
[0043] S2: the lidar scanner scans the profile of the vehicle to obtain the wheelbase and the center vertical line of the wheelbase;
[0044] S3: Control the steering wheel and the caster wheel that are far away from the lidar scanner to start, and adjust the length of the beam until the length of the beam is greater than the wheelbase of the vehicle, and the difference is greater than or equal to the first predetermined difference;
[0045]Since there is a length adjustment structure between the steering wheel and the universal wheel farther from the laser radar scanner and the laser radar scanner, the length adjustment structure Elongated, but the position of the lid...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention belongs to the technical field of vehicle carrying robots, and discloses a telescopic four-claw type vehicle carrying robot forklift method based on laser. The position relation of a vehicle carrying robot in the longitudinal beam direction is ensured by adjusting the plane where a laserradarscanner and an axle distance center vertical line are located to be perpendicular to the side face of a vehicle and a cross beam of the vehicle carrying robot. After the laserradarscanner corresponds to the center point of an axle distance of the vehicle, the distance between the laser radarscanner and the center point of the cross beam is moved, it is guaranteed that the center point of the cross beam corresponds to the center point of the axle distance of the vehicle, and the position relation of the vehicle carrying robot and the vehicle in the direction of the cross beam is positioned. Finally, it is ensured that a vehicle carrying robot forklift does not collide with wheels.
Description
technical field [0001] The invention belongs to the technical field of vehicle handling robots, and relates to a laser-based scalable four-claw vehicle handling robot forklift method. Background technique [0002] With the development of society and the improvement of the economy, the number of cars has increased sharply. Family cars have become a must-have means of transportation for every household. The problem of difficult parking in cities has also followed. Parking queues and looking for parking spaces take a long time. The method of parking in parking spaces can no longer meet the parking needs of various cities, so there are vehicle handling robots. [0003] At present, the single-layer shipping robots in the parking lot basically adopt a four-claw structure. The four fork arms cooperate in pairs to hug the tire clamps, and the vehicle tires are clamped up to realize the vehicle's handling through the movement of the walking arm. But, in the process that the fork arm...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More