

Blind guiding robot based on hybrid sensing system
A blind guide robot and perception system technology, applied in the field of blind guide robots, can solve the problems of no blind road, lack of voice broadcast, only suitable for simple and dark indoor environments, etc., and achieve the effect of accurate positioning, rich collection and output information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention more clear, the following will clearly and completely describe the technical solutions of the embodiments of the present invention in conjunction with the drawings of the embodiments of the present invention. Apparently, the described embodiments are some, not all, embodiments of the present invention. Based on the described embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention.
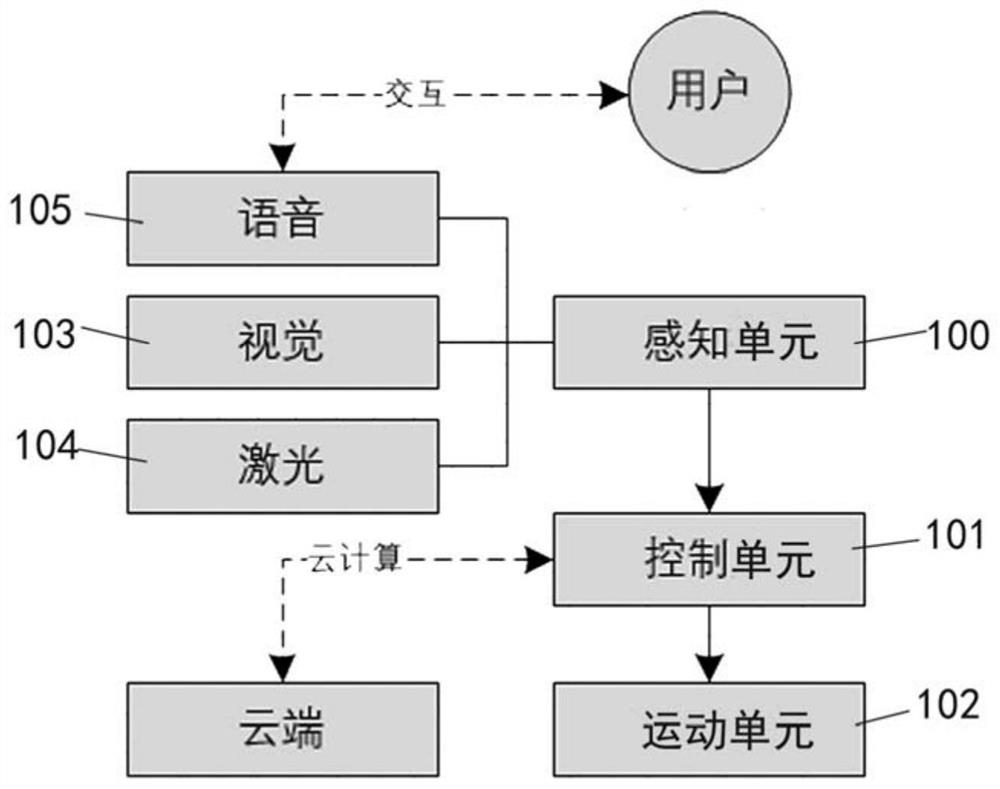
[0041] see figure 1 -3 shows that the blind-guiding robot based on the hybrid perception system includes a sensing unit 100, a control unit 101 and a motion unit 102, and the sensing unit acquires the surrounding environment in the traveling process of the blind-guiding robot, and transmits the perception data acquiring the surrounding environme...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More