

Multi-AUV collaborative navigation method adopting factor graph and sum product algorithm
A collaborative navigation and factor graph technology, which is applied in navigation, surveying and mapping and navigation, navigation calculation tools, etc., can solve the problems of not realizing the determination of AUV orientation, etc., and achieve good system scalability, small calculation amount, and strong applicability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
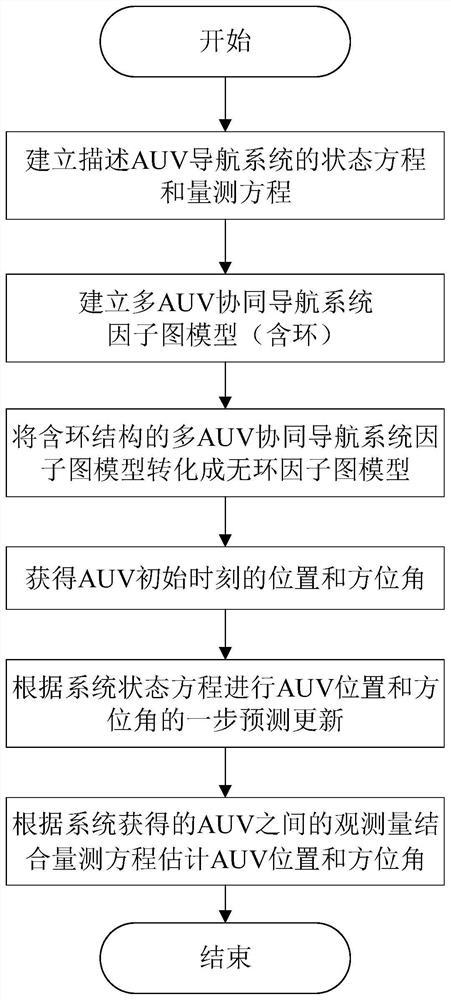
[0061] A kind of multi-AUV cooperative navigation method based on factor graph and sum-product algorithm of the present invention specifically includes:
[0062] Step 1. Obtain the position and azimuth of the initial moment of the AUV to be positioned;
[0063] Step 2. In the multi-AUV cooperative navigation system, the AUV to be positioned receives the current own position broadcast by other AUVs;
[0064] Step 3, the AUV to be positioned obtains the ranging information and relative observation angle information between it and other AUVs according to the equipped sensors;
[0065] Step 4, establishing a state equation describing the AUV to be positioned;
[0066] Step 5, establishing a measurement equation describing the AUV to be positioned;
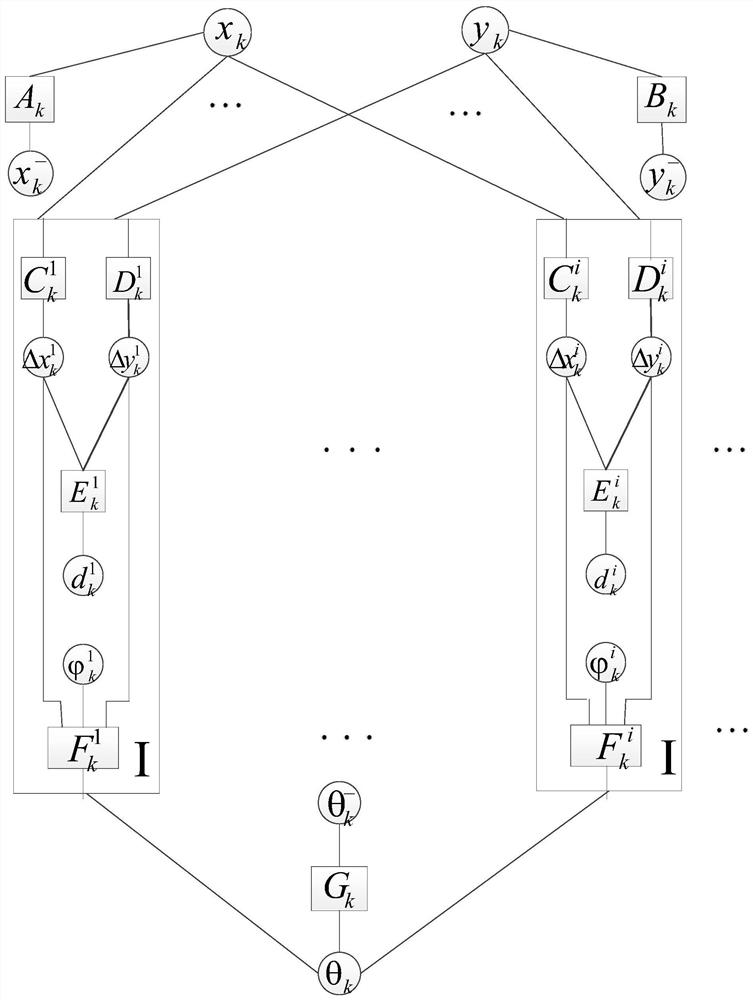
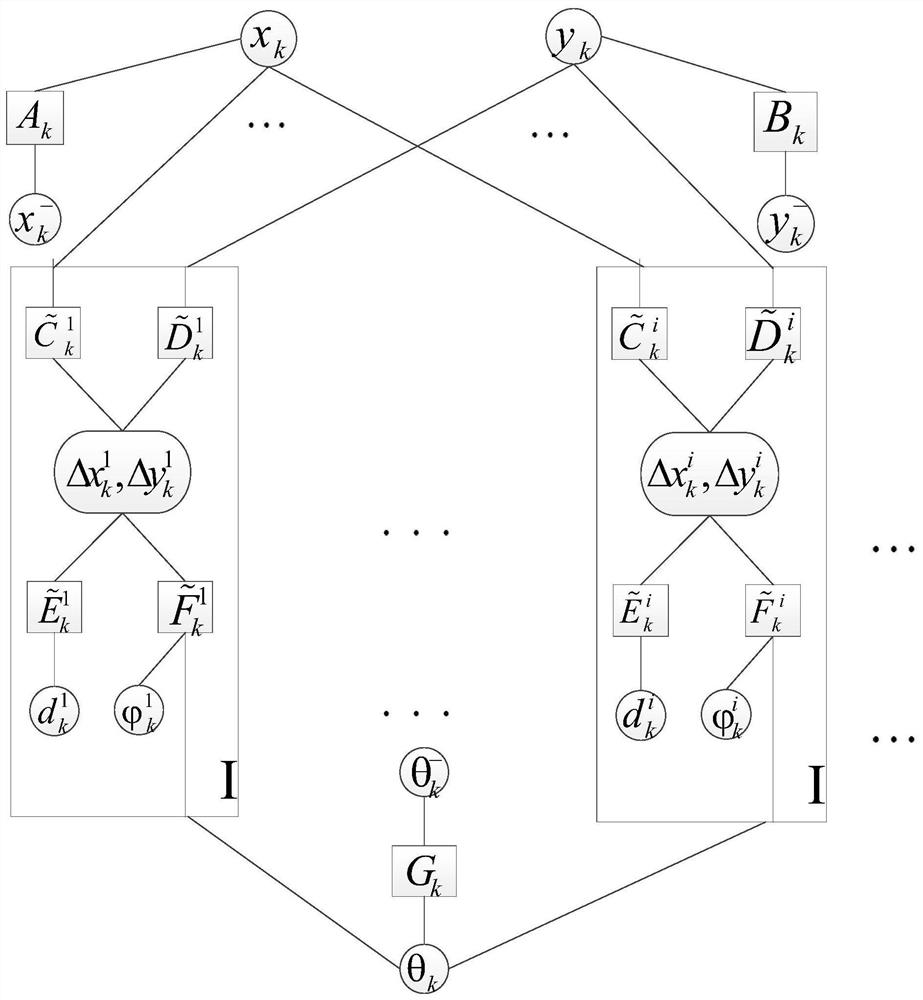
[0067] Step 6. Establish a corresponding factor graph model according to the state equation and m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More