

Robot end effector for picking flat and cut stalk of fruit, and operation method
A technology of end effectors and robots, which is applied in the field of agricultural robots, can solve problems such as fracture, difficulty in meeting the requirements of flat stems, and difficulty in picking flat stems, and achieves self-adaptive poses, avoiding damage, and simple and reliable structures.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, but the protection scope of the present invention is not limited thereto.
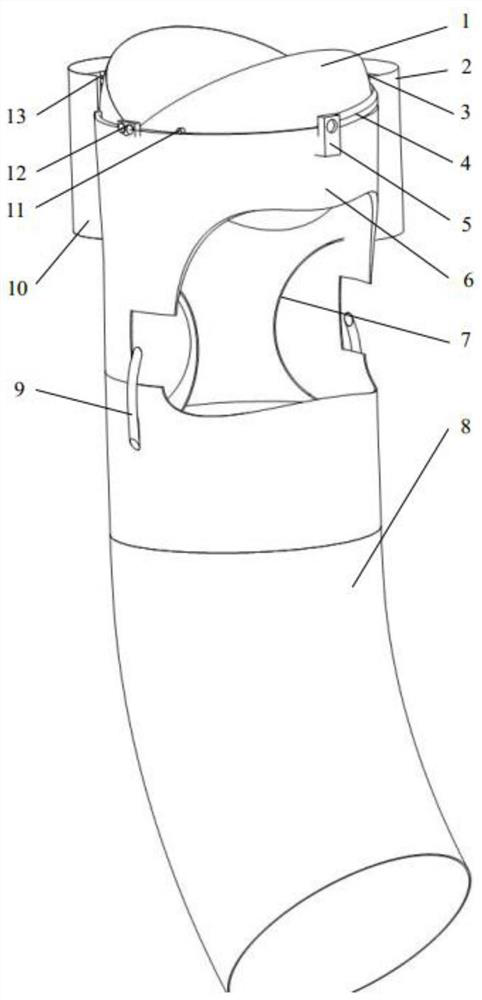
[0052] Such as figure 1 As shown, the robot end effector for fruit flat stem picking includes a cylindrical annular airbag mechanism, a spherical two-finger mechanism and a swing knife mechanism. Knife mechanism is also installed on the cylinder 6 upper nozzle surface of cylinder annular air bag mechanism.
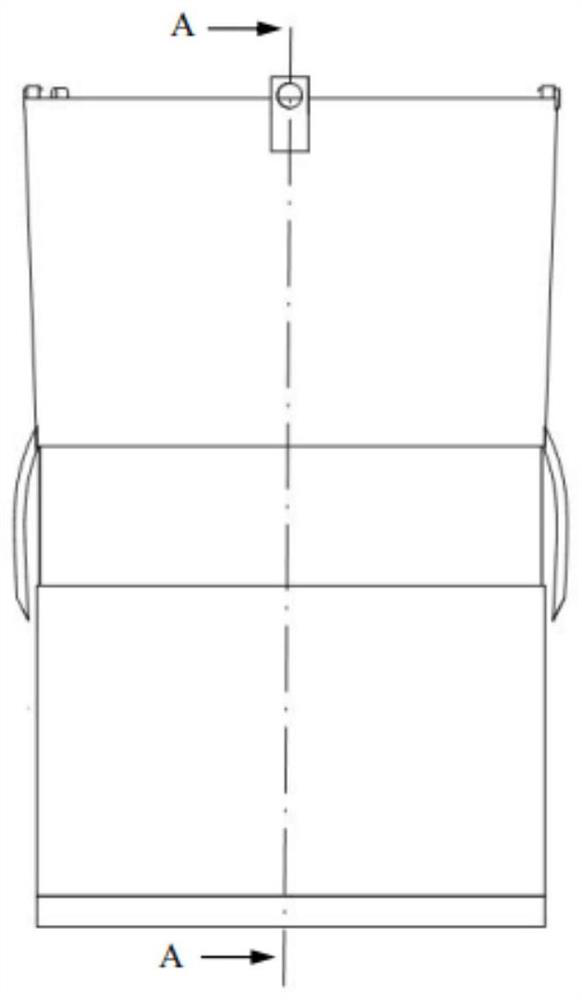
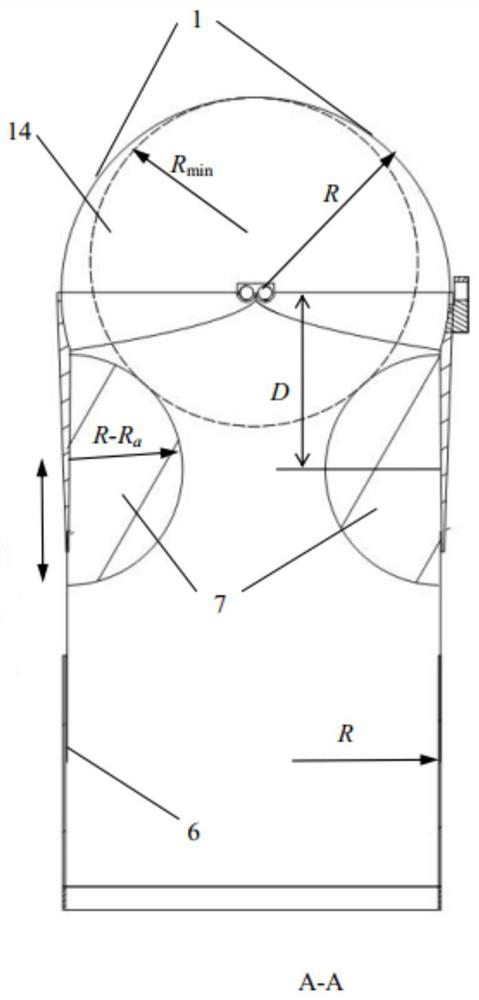
[0053] Such as figure 1 As shown in FIG. 2 , the cylindrical annular air bag mechanism includes a cylinder 6 , an annular air bag 7 , a trachea 9 , a sliding module, a pneumatic system and a fruit delivery hose 8 . The annular airbag 7 is installed on the inner wall of the cylinder 6 through a sliding module, the vertical centerline of the annular airbag 7 coincides with the centerline of the cylinder 6, and the direction in which the annular airbag 7 slides along t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More