

Wall-climbing robot with obstacle crossing function and obstacle crossing method thereof
A wall-climbing robot, functional technology, applied in the direction of motor vehicles, transportation and packaging, etc., can solve the problems of slow moving speed, slow moving speed of sucker adsorption, and unobvious advantages of obstacle avoidance, and achieve strong versatility and improve safety. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
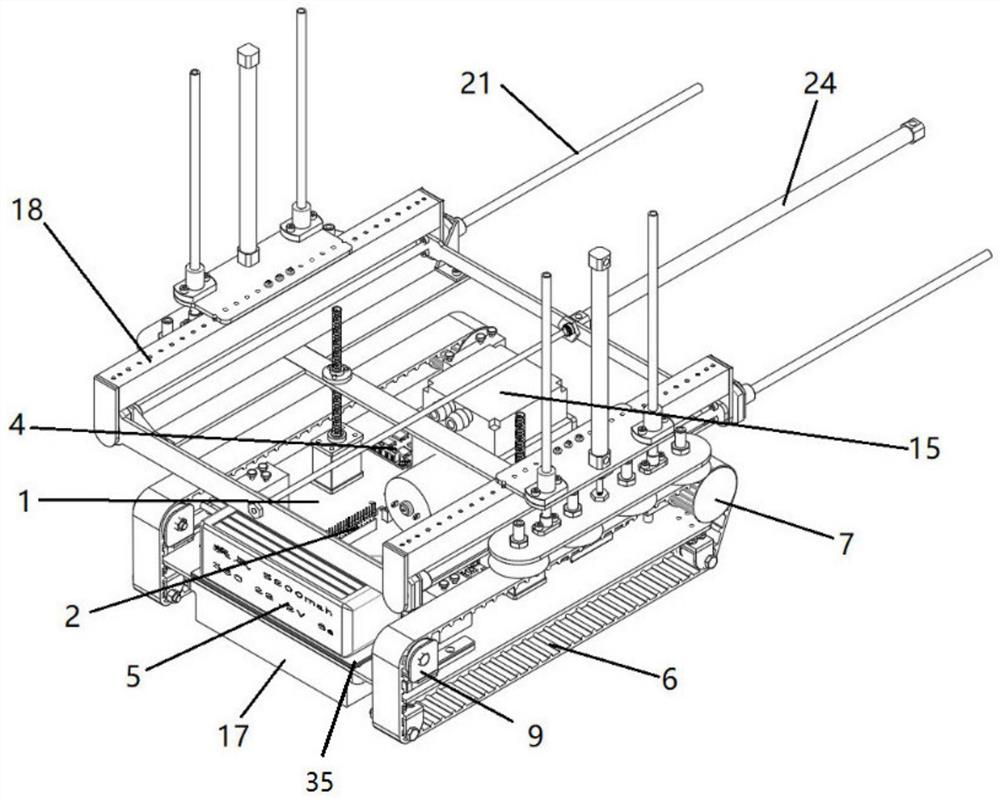
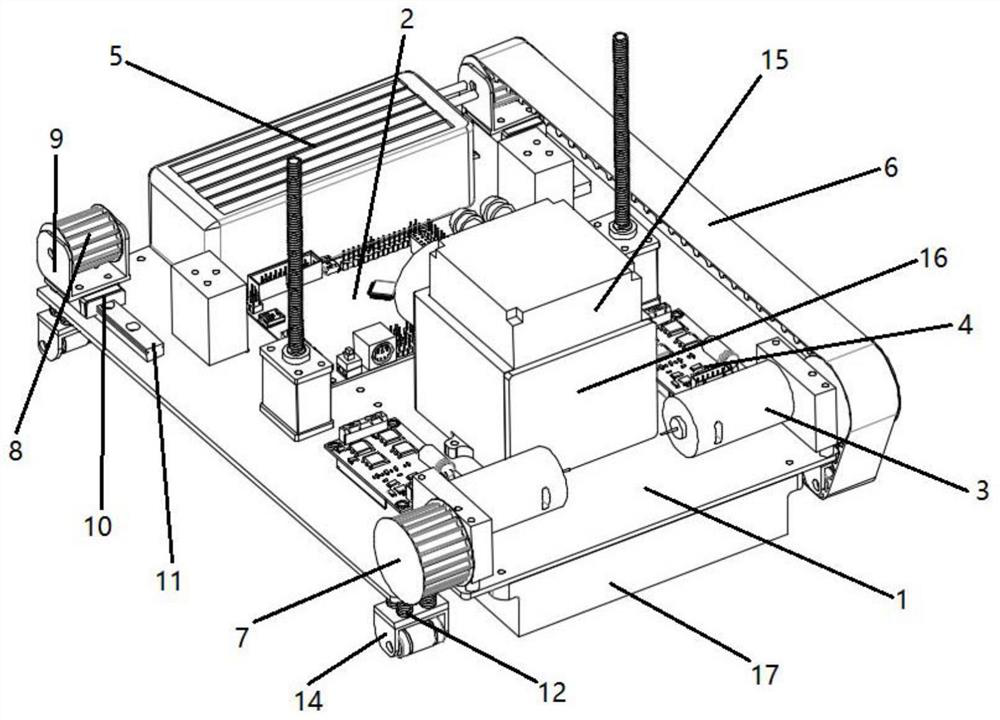
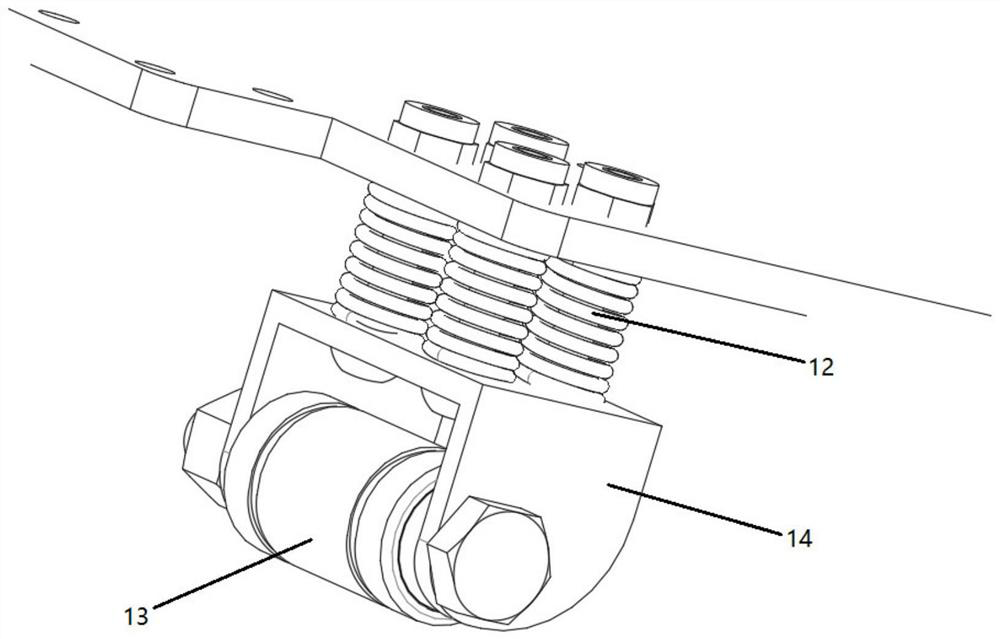
[0033] Embodiment 1: as Figure 1-7As shown, a wall-climbing robot with obstacle-climbing function includes a chassis mechanism and an upper obstacle-climbing mechanism installed above the chassis mechanism; the chassis mechanism includes a bottom plate 1, a moving part, and a vacuum adsorption part; The moving part and the vacuum adsorption part, the moving part is used to provide the driving force for forward and backward movement, and the vacuum adsorption part is used to absorb the wall surface; the upper obstacle surmounting mechanism includes a frame, a cylinder part, a suction cup part and a screw part; the frame uses For installing the cylinder part and the suction cup part, the cylinder part is used to install the screw part and drive the chassis mechanism to move back and forth, the suction cup part is used to absorb the wall surface, and the screw part is used to drive the chassis mechanism to move up and down.
[0034] Further, it can be set that the moving part in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More