

Surveying and mapping method for automatically scanning road by airborne three-dimensional laser scanner
An automatic scanning, three-dimensional laser technology, applied in the field of UAV surveying and mapping, can solve problems such as crashes and reduce collisions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The following will be further described in detail below with reference to specific embodiments:
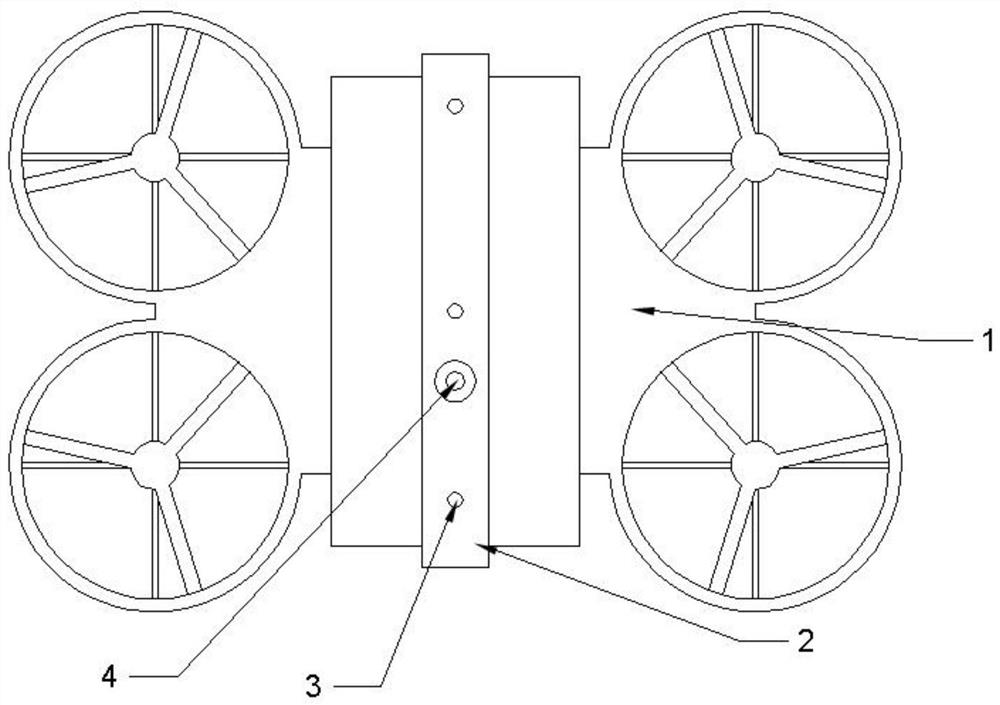
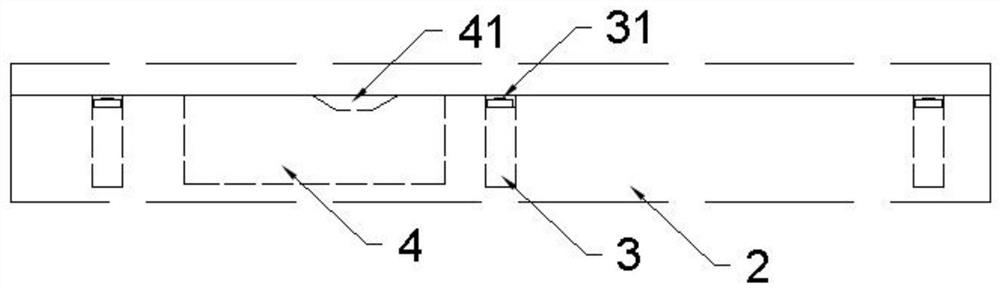
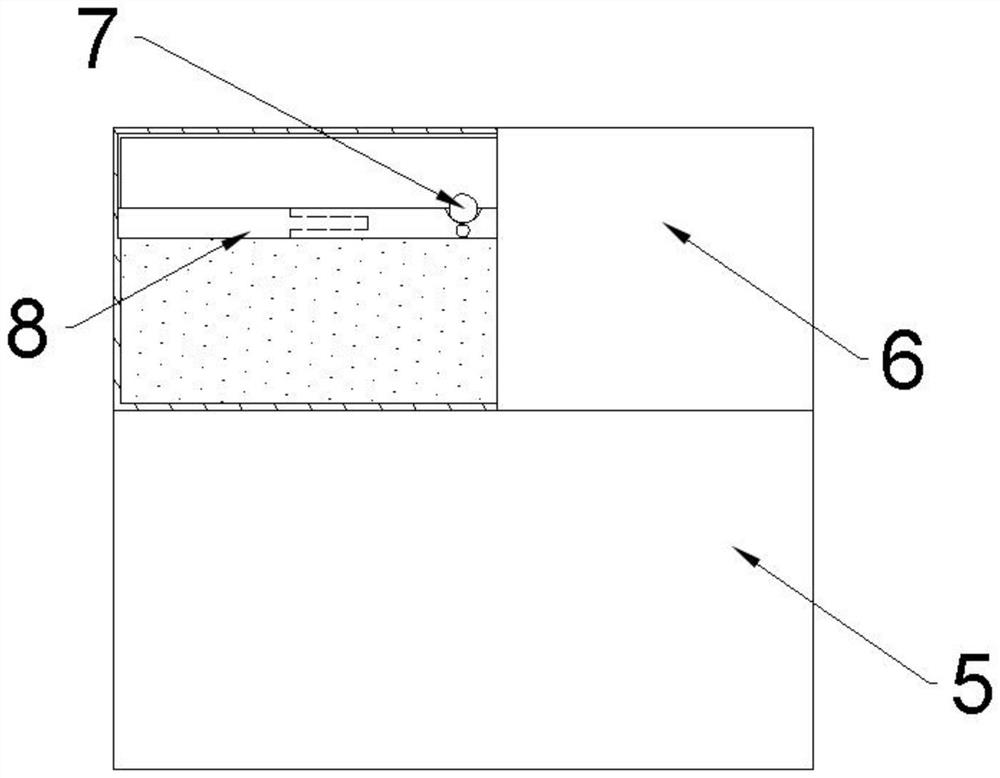
[0021] Reference numerals in the drawings include: driver, support frame 2, trigger member 3, triggering switch 31, air supply 4, air outlet 41, battery bin 5, regulating box 6, adjustment member 7, horizontal plate 8 .
[0022] Embodiments are basically figure 1 with figure 2 As shown: the air-boring three-dimensional laser scanner automatically scan the road mapping method, including the following steps:
[0023] Flight Steps: Drone 1 Flight according to the preset flight route;
[0024] Scan step: The scanner mounted on the drone 1 scans the scenery in the flight route and obtains three-dimensional coordinates of the surface of the measured object, and processes the obtained three-dimensional coordinates to obtain the mapping image;
[0025] Protection step: When the communication module of the drone 1 is turned on, the protective system set up on the installation cavity on ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More