

A flexible laparoscopic actuator based on series elastic elements and continuum configuration
A series of elastic and continuum technology, applied in the field of robotics, can solve problems such as the inability to cooperate with the stability of the robotic arm and the inability to prevent unexpected situations, and achieve the effect of eliminating unfavorable surgical factors, good elasticity, and high control accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further described through the embodiments below in conjunction with the accompanying drawings.
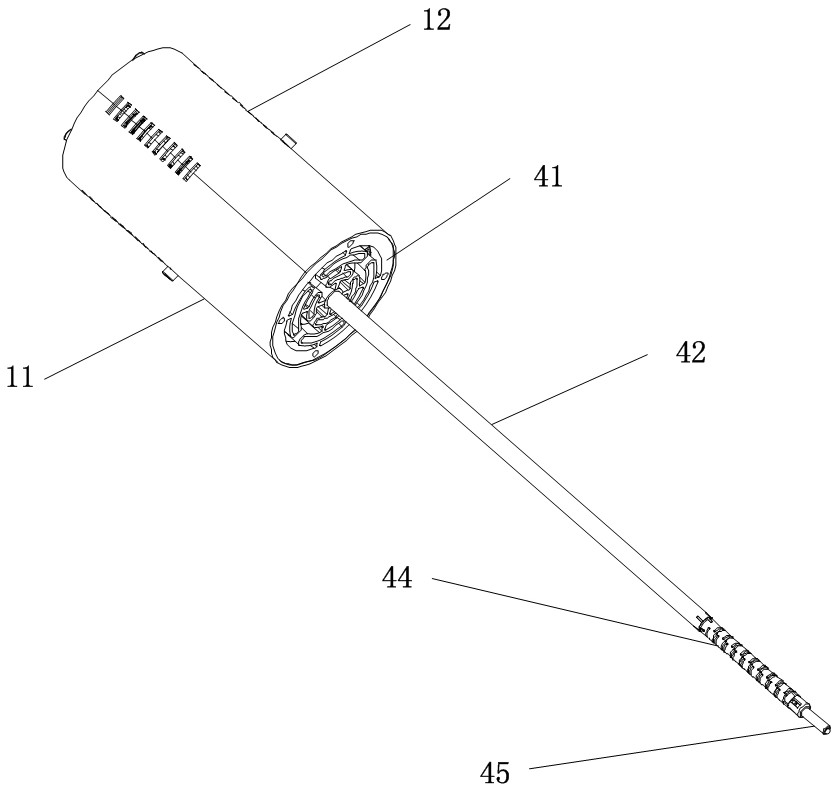
[0036] see figure 1 , a flexible laparoscopic actuator based on a series elastic element and a continuum configuration includes a driving mechanism, a cable guiding mechanism and a lens assembly 45 .
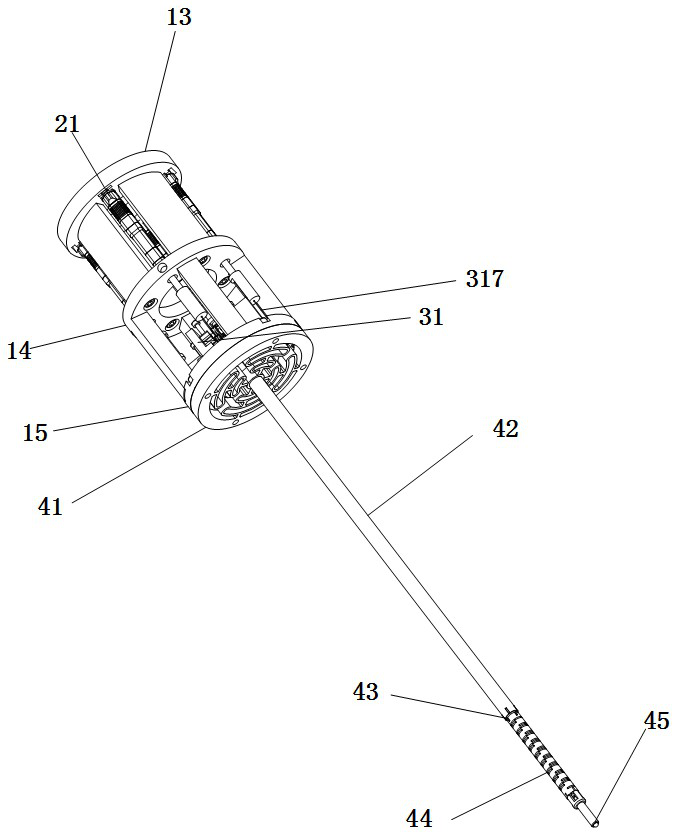
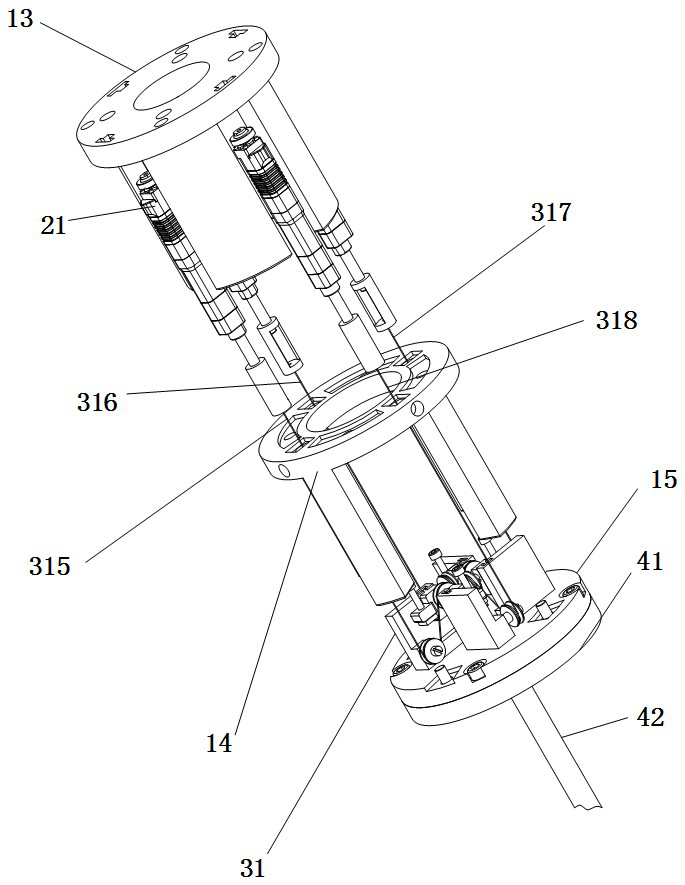
[0037] see figure 2 , image 3 , the driving mechanism includes four linear motors 21, four flexible cables, four pre-tensioning mechanisms, the first fixing part 13, the second fixing part 14 and the fixing plate 15. The linear motor 21 is a screw-type linear motor, and the four flexible cables are a first flexible cable 315 , a second flexible cable 316 , a third flexible cable 317 and a first flexible cable 318 . The first fixing part 13, the second fixing part 14 and the fixing plate 15 are sequentially connected to form a columnar body; the four linear motors are evenly distributed in the first fixing part 13, and one end of the four flex...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More