Design method of fast finite time controller of full-state constraint mechanical arm
A technology with limited time and design method, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of long control time, large tracking error, inability to meet control requirements, etc. of the manipulator, so as to ensure accurate tracking. Control and ensure stable results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
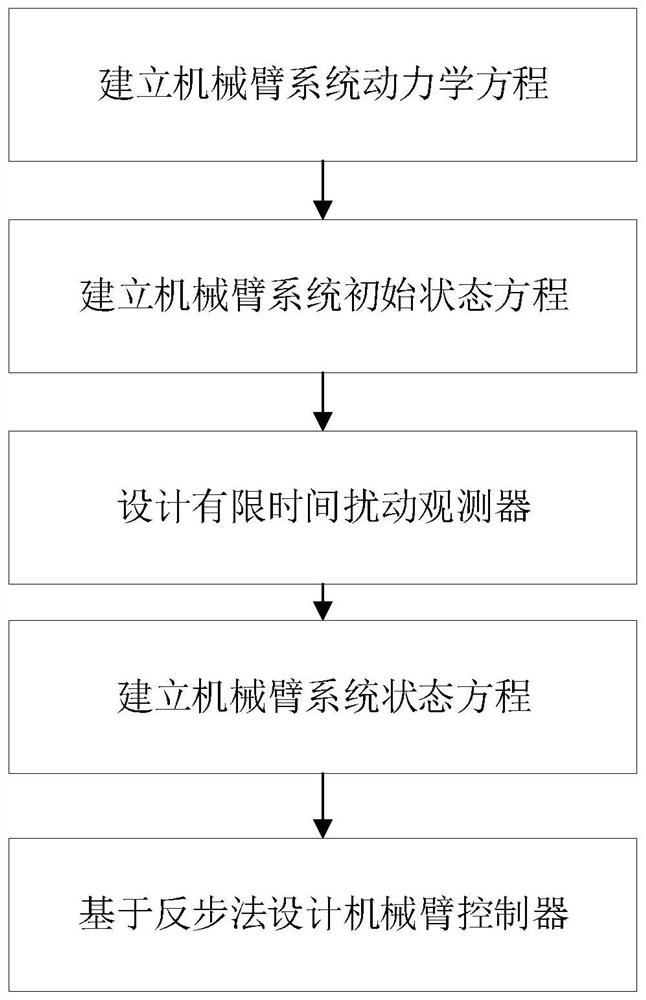
[0060] Please refer to figure 1 , Embodiment 1 of the present invention provides a design method for a fast finite-time controller of a full-state constrained manipulator, comprising the following steps:
[0061] Step S1, design the observer, specifically:
[0062] S1.1, establish the dynamic equation of the manipulator system:
[0063]
[0064] where q is the angular position, is the angular acceleration, M is the moment of inertia, m is the mass of the connecting rod, g is the acceleration due to gravity, F is the force, and l is the length of the connecting rod;
[0065] S1.2, establish the initial state equation of the manipulator system:
[0066] Define the state variables and control inputs of the manipulator system as follows:
[0067]
[0068] where x 1 、x 2 is the state variable of the manipulator system, u is the control input of the manipulator system, is the angular velocity;
[0069] Then the dynamic equation (1) of the manipulator system is expres...
Embodiment 2
[0106] The purpose of Embodiment 2 is to provide a computing device, including a memory, a processor, and a computer program stored on the memory and operable on the processor. When the processor executes the program, the following steps are implemented, including:
[0107] Step S1, design the observer, specifically: establish the dynamic equation of the manipulator system; establish the initial state equation of the manipulator system; design a finite time disturbance observer; establish the state equation of the manipulator system;
[0108] Step S2, design the controller of the manipulator based on the backstepping method.
Embodiment 3
[0110] The purpose of Embodiment 3 is to provide a computer-readable storage medium, on which a computer program is stored, and when the program is executed by a processor, the following steps are performed:
[0111] Step S1, design the observer, specifically: establish the dynamic equation of the manipulator system; establish the initial state equation of the manipulator system; design a finite time disturbance observer; establish the state equation of the manipulator system;
[0112] Step S2, design the controller of the manipulator based on the backstepping method.
[0113] The various steps and methods involved in the device in the above embodiments correspond to those in Embodiment 1, and for specific implementation details, please refer to the relevant description of Embodiment 1. The term "computer-readable storage medium" shall be understood to include a single medium or multiple media including one or more sets of instructions: it shall also be taken to include any me...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More