

A sampling control method, controller and system for unmanned aerial vehicle
A control method and sampling system technology, applied in control/regulation systems, attitude control, non-electric variable control, etc., can solve problems such as damage, drone falling, and easy entanglement, and achieve flexible control, high-precision sampling, Guaranteed safety effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0035] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
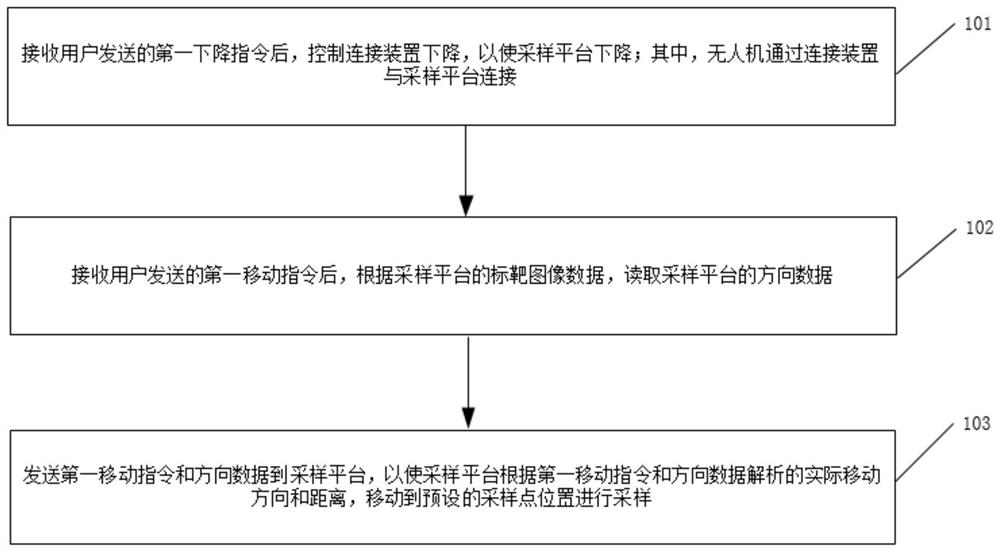
[0036] See figure 1 , figure 1 It is a schematic flow chart of an embodiment of the UAV sampling control method provided by the present invention; as figure 1 As shown, the specific steps of the UAV sampling control method include steps 101 to 103:
[0037] Step 101: After receiving the first descending instruction sent by the user, control the connecting device to descend, so that the sampling platform descends; wherein, the UAV is connected to the sampling plat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More