

Obstacle map generation method and device, vehicle and storage medium
A technology for map generation and obstacles, applied in the direction of control devices, etc., can solve problems such as affecting the driver's use experience and driving safety, and inaccurate obstacle maps, so as to improve the driving experience, improve safety, and accurately generate the effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
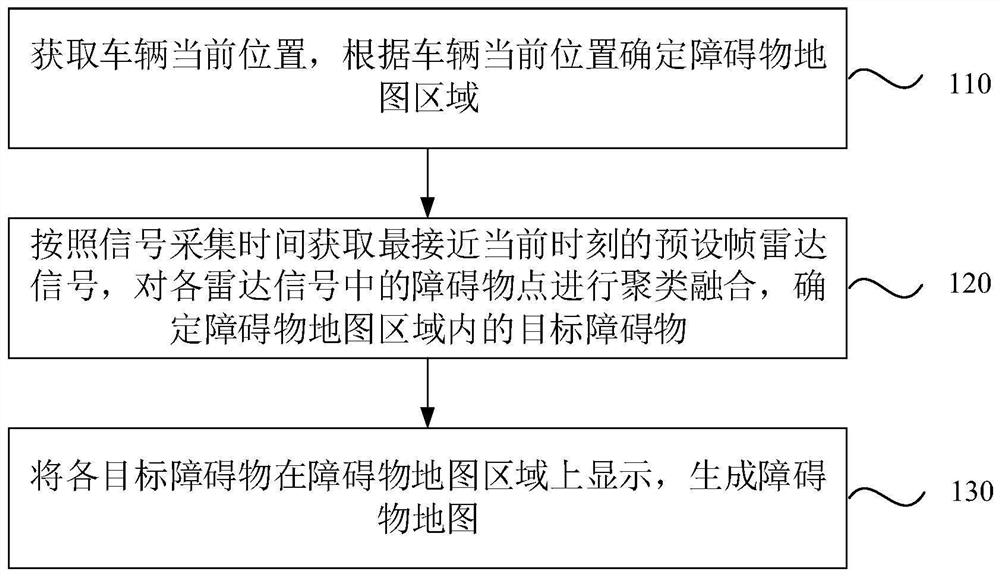
[0055] figure 1 A flow chart of an obstacle map generation method for the embodiment of the present invention, the present embodiment can be applied to detect the obstacle around the vehicle, and generate a map of the obstacle, the method can be generated by an obstacle map. The device is executed, which can be implemented by software and / or hardware.
[0056] Such as figure 1 As shown, the method specifically includes the steps of:
[0057] Step 110, obtain the current position of the vehicle, determine the map area of the obstacle according to the current position of the vehicle.
[0058]Wherein, the current location of the vehicle can be understood as the location information of the current time of the vehicle. The map area of the obstacle can be understood as the area range for constructing the map of the obstacle. In the present embodiment, it is possible to select a certain area where the current position of the vehicle is a barrier map area, of course, can also bind ...
Embodiment 2
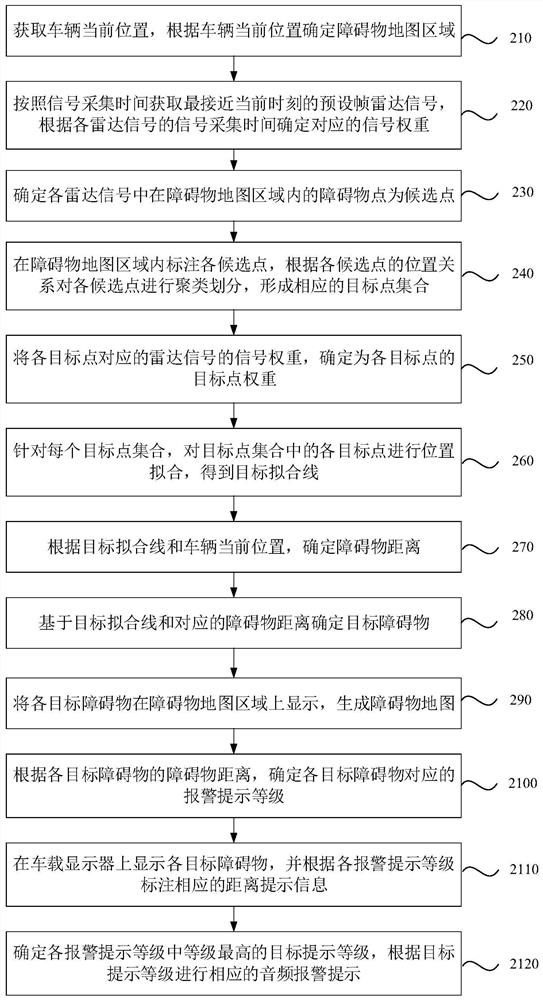
[0070] figure 2 A flow chart of an obstacle map generating method according to the second embodiment of the present invention. Based on the above embodiment, the above-described obstacle map generation method is further optimized.
[0071] Such as figure 2 As shown, the method specifically includes:
[0072] Step 210, obtain the current position of the vehicle, determine the map area of the obstacle according to the current position of the vehicle.
[0073] Specifically, the current position of the vehicle can be acquired by the positioning device on the vehicle, and a certain area where the vehicle current position is the obstacle map area, or the traveling direction of the vehicle can determine the map area of the obstacle, such as the vehicle traveling forward. You can select a large area in front of the vehicle and the rear of the vehicle as the map area. When the vehicle is in the reverse state, it is more concerned that the distribution of the rear obstacle is more conc...
Embodiment 3
[0115] The obstacle map generating apparatus provided by the embodiment of the present invention can perform an obstacle map generating method according to any embodiment of the present invention, and a functional module and beneficial effects of performing a method. Figure 4 It is a structural block diagram of an obstacle map generating apparatus provided in the third embodiment of the present invention, such as Figure 4 As shown, the apparatus includes: the map area determining module 310, the target obstacle determination module 320, and the obstacle map generating module 330.
[0116] The map area determining module 310 is configured to obtain the current position of the vehicle, determine the obstacle map area according to the current position of the vehicle.
[0117] The target obstacle determination module 320 is used to obtain a preset frame radar signal closest to the current time in accordance with the signal acquisition time, and the obstacle points in each radar signal...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More