

Autonomous controllable multi-system high-precision navigation equipment and navigation method
A navigation device, high-precision technology, used in the field of communications
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
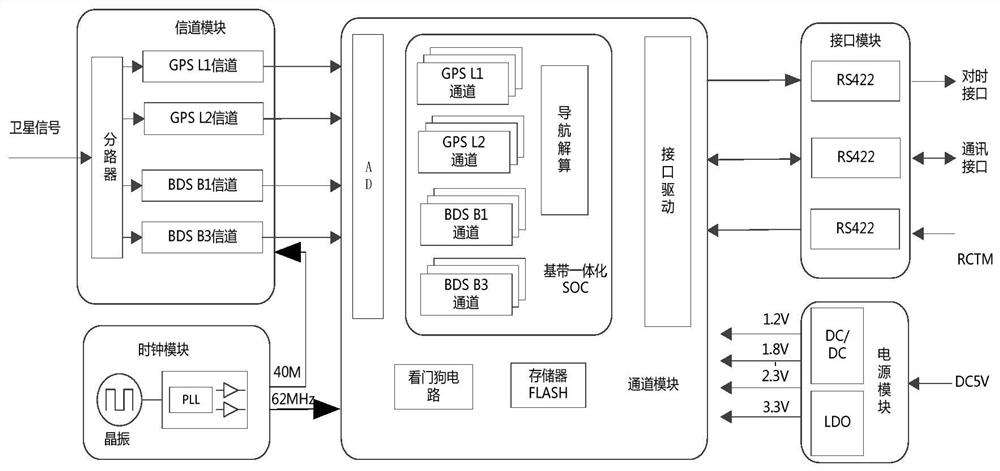
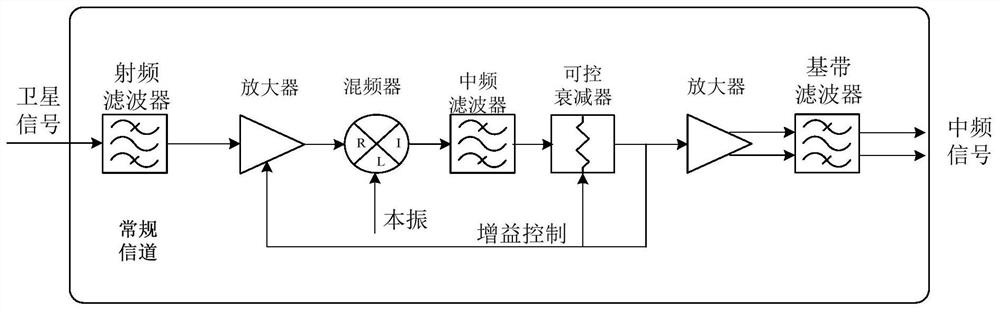
[0054] The autonomously controllable dual-system high-precision navigation device in this embodiment includes a power supply module, a clock module, a channel module, a channel module and an interface module. The power supply module is used to supply power to the clock module, channel module, channel module, and interface module; the clock module is used to provide a clock reference for the channel module and the channel module; the channel module is used to use different channels for GPS signals and Beidou signals Receive, amplify, and down-convert the frequency, and send the down-converted intermediate frequency signal to the channel module for digital domain processing after AD sampling; the channel module is used to quickly capture, track, and demodulate GPS signals and Beidou signals. Navigation and positioning of GPS signals and Beidou signals; the interface module is used for communicating with the outside.
[0055] The power supply module can include DC / DC circuit, LDO...
Embodiment 2
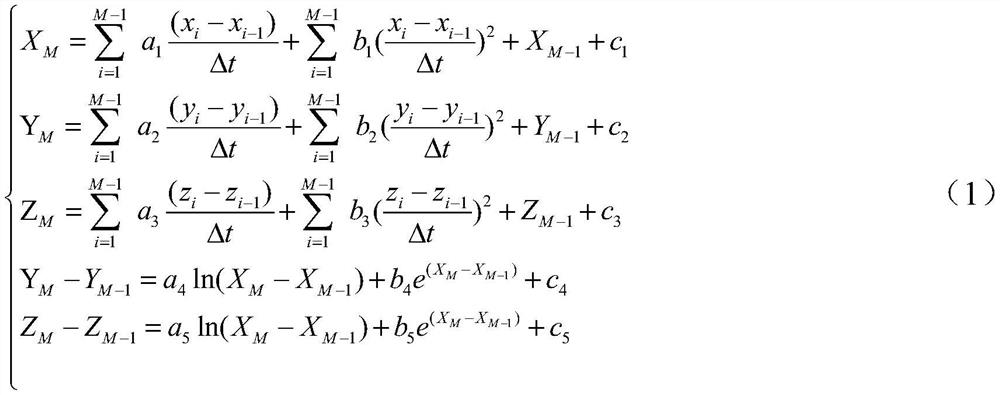
[0062] In this embodiment, a new navigation calculation method that can be realized by using the navigation device in Embodiment 1 or other dual-system navigation devices is provided.
[0063] Although the system configuration is given in Embodiment 1, the calculation method adopted by this system configuration still continues the existing calculation method.
[0064]Moreover, although GPS and BDS two positioning systems are used for positioning, and the two are mutually verified, the accuracy can be improved. However, when the two positioning systems encounter signal jumps, one of the signal quality is very poor, or both signal quality When it is very poor, it is easy to have a large deviation of the positioning position, and it is difficult to determine which of the two positioning methods has the higher accuracy of the positioning system, which affects the positioning stability. In addition, when the ambiguity resolution method is used for solving, the calculation amount is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More