

A Variable Stiffness Flexible Actuator
A flexible driver and variable stiffness technology, applied in the direction of manufacturing tools, chucks, manipulators, etc., can solve the problems of high price and complex structure, and achieve the effect of increasing stability, high fault tolerance, and increasing rigidity and strength
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, but not all of the embodiments. Based on the embodiments of the present invention, all knowledge obtained by those of ordinary skill in the art without creative efforts
[0022] Other embodiments fall within the protection scope of the present invention.
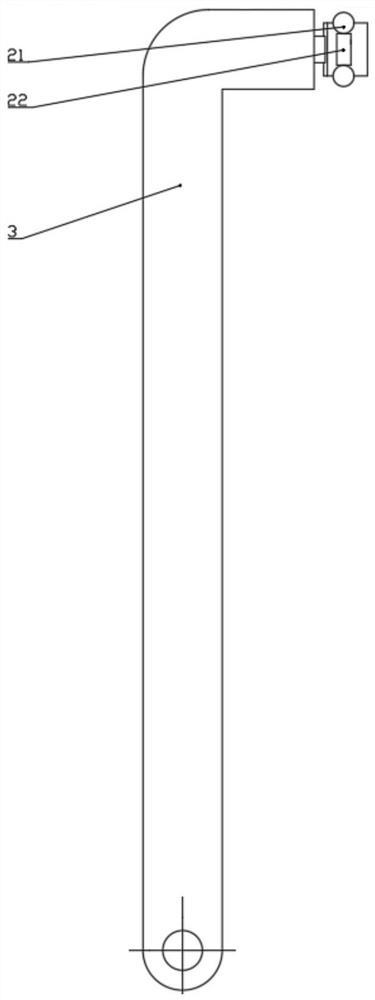
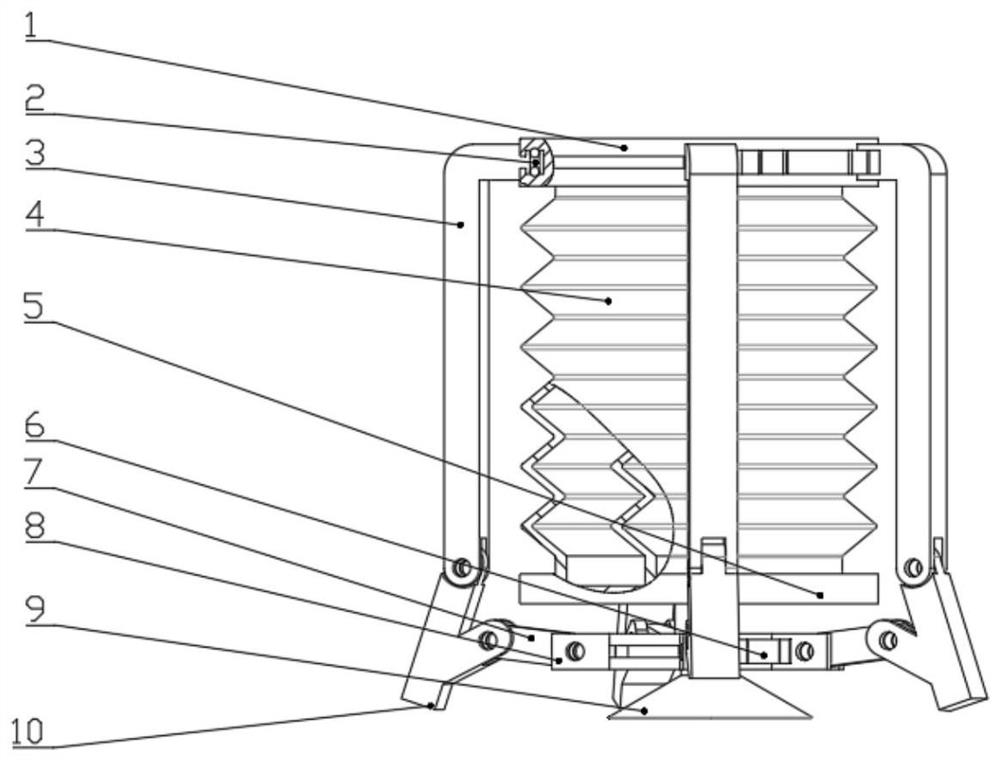
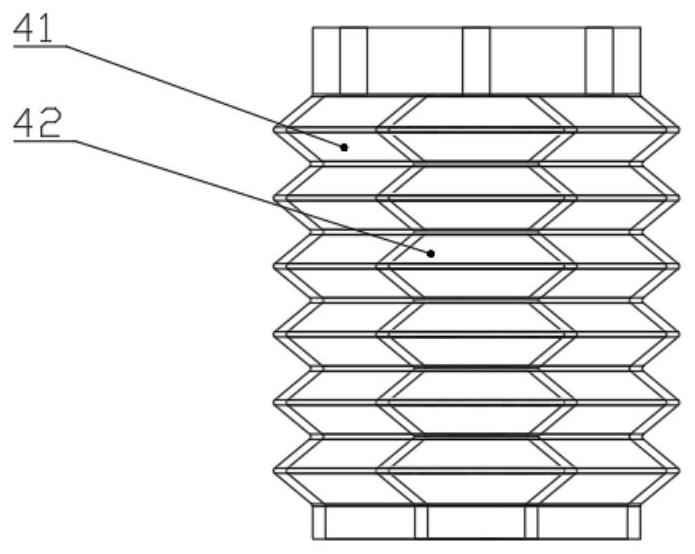
[0023] Please refer to the attached Figure 1-4 , In the embodiment of the present invention, a variable rigidity flexible driver includes an upper disc track holder 1, a self-locking device 2, an upper connecting bracket 3, a double-layer inner and outer compression airbag 4, a lower disc track holder 5, a fan-shaped telescopic Airbag 6 , connecting rod 7 , lower connecting bracket 8 , suction cup 9 , clip finger mounti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More