

Wire clamping device of hot-line work robot and operation method thereof
A technology for live work and wire clamps, applied in the directions of circuit/collector parts, circuits, electrical components, etc., can solve the problems of overload damage to the robot arm, the operation cannot be carried out normally, and the risk of failure to catch the wire is high, so as to overcome the load Insufficient, improve the success rate of grabbing, improve the effect of working efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] Preferred embodiments of the present invention will be described below in conjunction with the accompanying drawings, and the technical solution of the present invention will be explained more clearly and completely.
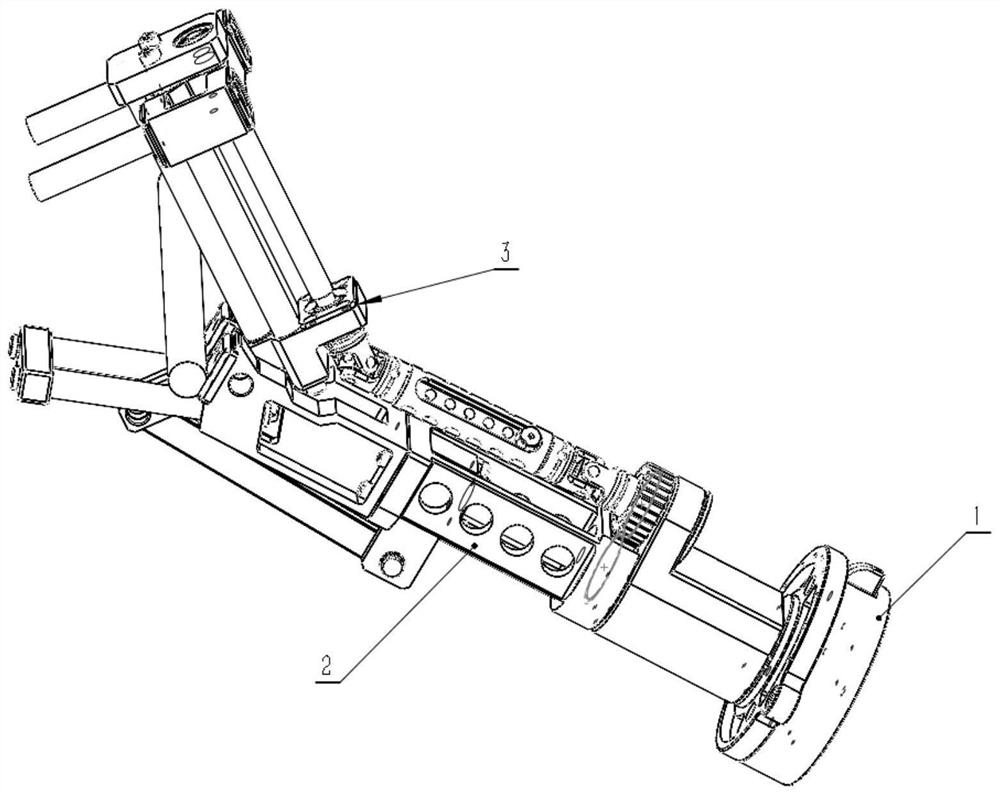
[0026] Such as figure 1 Shown is a new type of tensioner for a live working robot, which includes a docking assembly 1 , a fixed jaw assembly 2 , and a movable jaw assembly 3 .
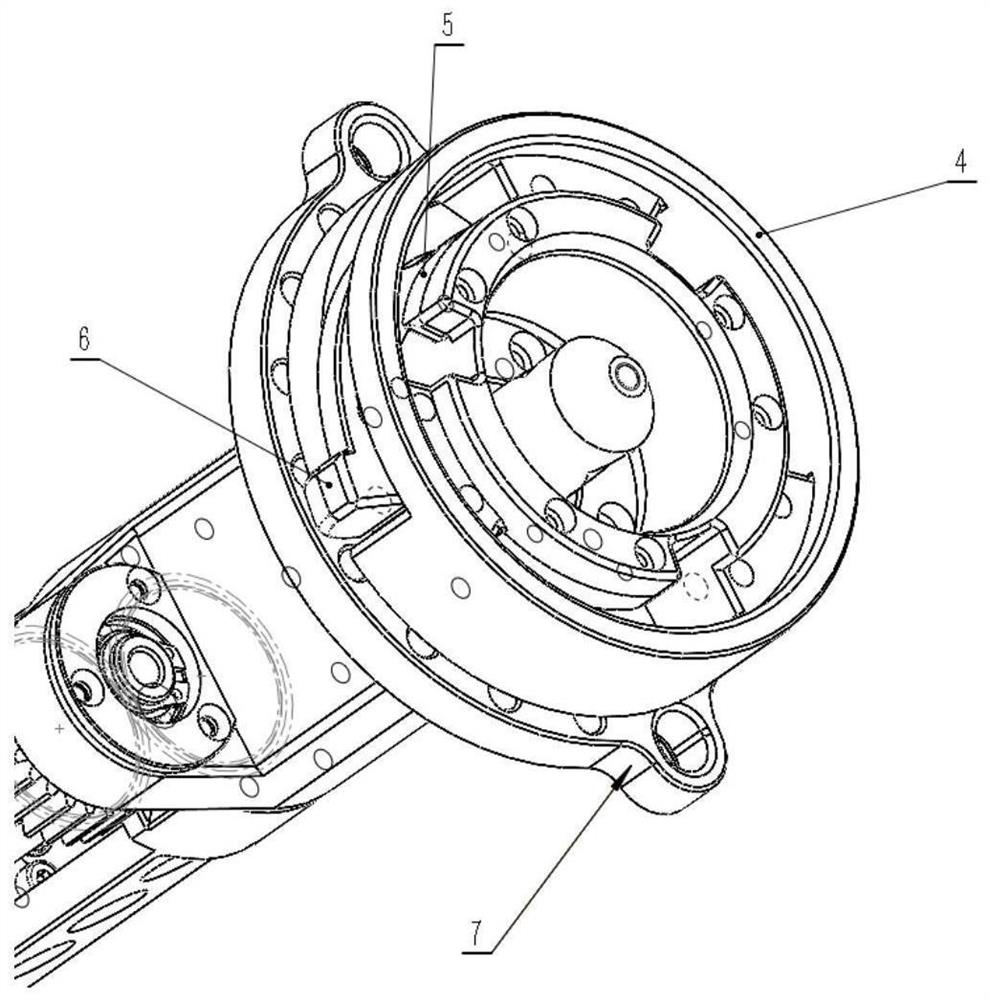
[0027] Such as figure 2 As shown, the docking assembly 1 includes a tool tray 4, an inclined plane block 5, a locking lever 6, and a guide positioning plate 7, wherein three inclined plane blocks 5 are connected to the tool tray 4 by screws, and the locking lever 6 is connected to the tool tray 4 A spring is compressed between them, connected by a straight pin, and the guiding positioning disc 7 and the tool disc 4 are fixed by screws.
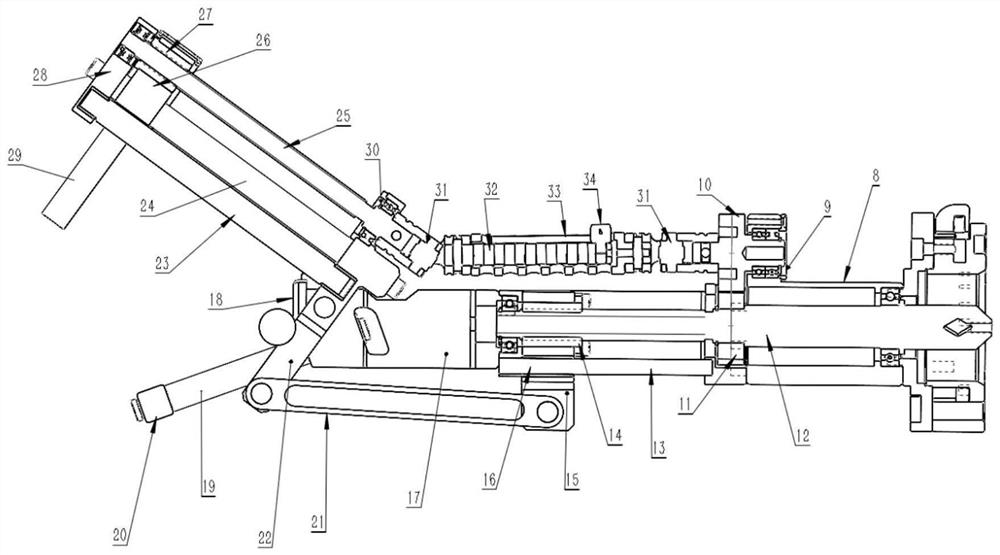
[0028] Such as image 3 As shown, the fixed jaw assembly 2 includes a gear base 8, a thread clamping screw rod 12, a thread clamping base 13...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More