

Pose active compliance adjusting mechanism for negative pressure adsorption cavity of wall-climbing robot
A technology for wall-climbing robots and adjustment mechanisms, applied in the field of robotics, can solve the problems of insufficient adsorption of wall-climbing robots, lack of adaptability to curved surfaces, and small adsorption force, etc., to solve the problem of climbing adsorption, simple structure, and good adsorption Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In order to make the purpose, technical solution and advantages of the present invention clearer, the embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
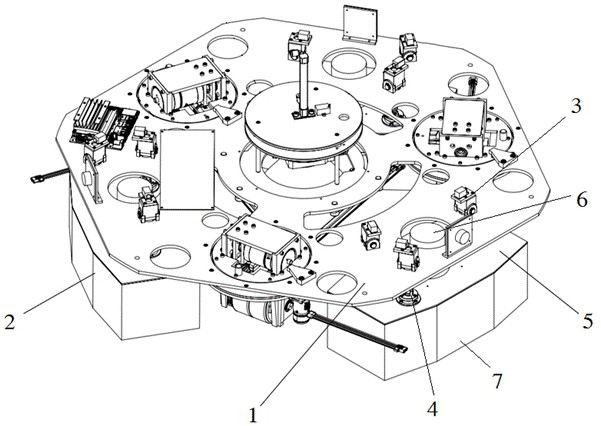
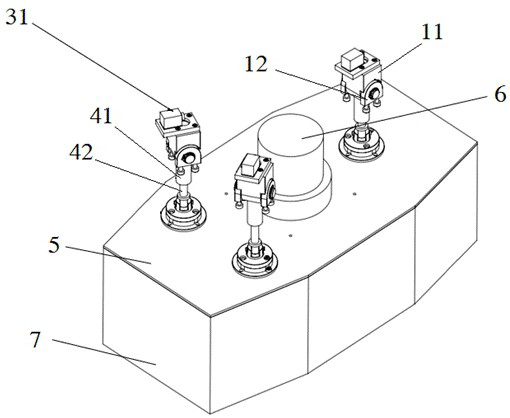
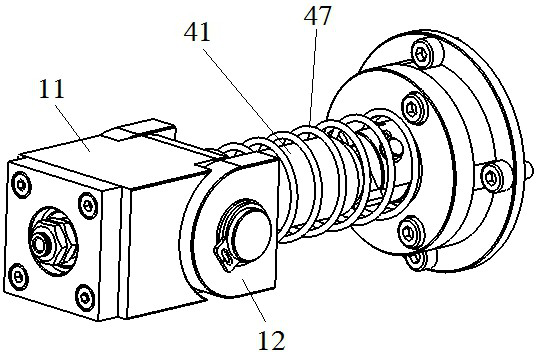
[0028] See Figure 1 to Figure 5 , the embodiment of the present invention provides an active compliance adjustment mechanism for the negative pressure adsorption cavity of a wall-climbing robot, including a chassis 1 and a plurality of adsorption components 2 .
[0029] A plurality of the adsorption assemblies 2 are arranged at intervals around the circumference of the chassis 1, and the adsorption assemblies 2 include a plurality of driving mechanisms 3, a plurality of connecting parts 4, an adsorption cavity bottom plate 5, a fan 6 and a flexible organ cover 7, the The connector 4 includes a connecting end 41 and a moving rod 42, the connecting end 41 is hinged to the chassis 1, and for ease of installation, the connecting end 41 is connected to the c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More