Label optimization point cloud instance segmentation method
A point cloud and label technology, applied in the field of label optimization of point cloud instance segmentation, can solve the problems that the model cannot be applied to other data, the amount of data is small, and overfitting, etc., to improve the effect of point cloud segmentation results.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
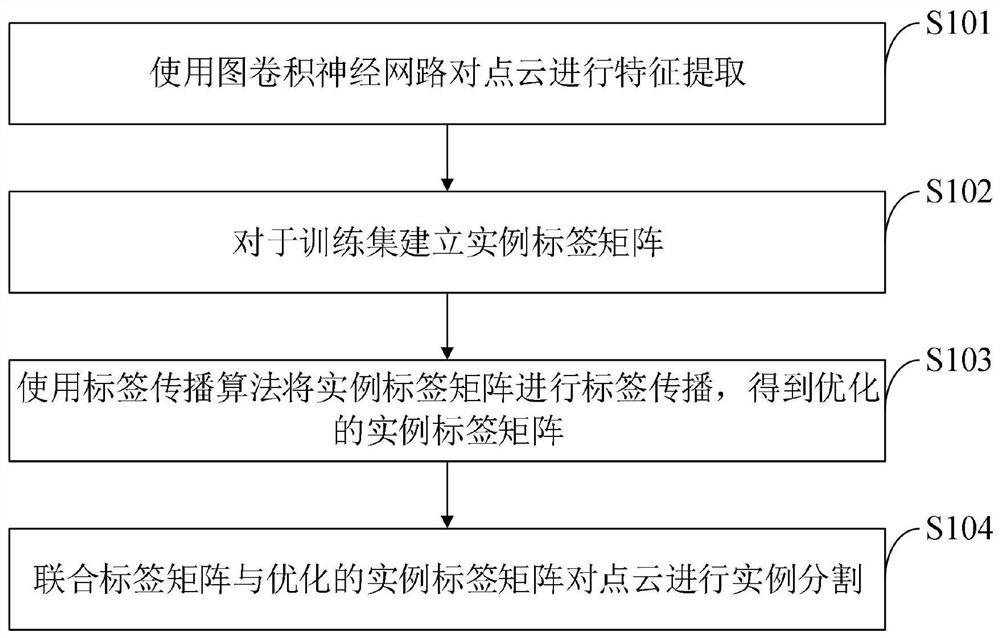
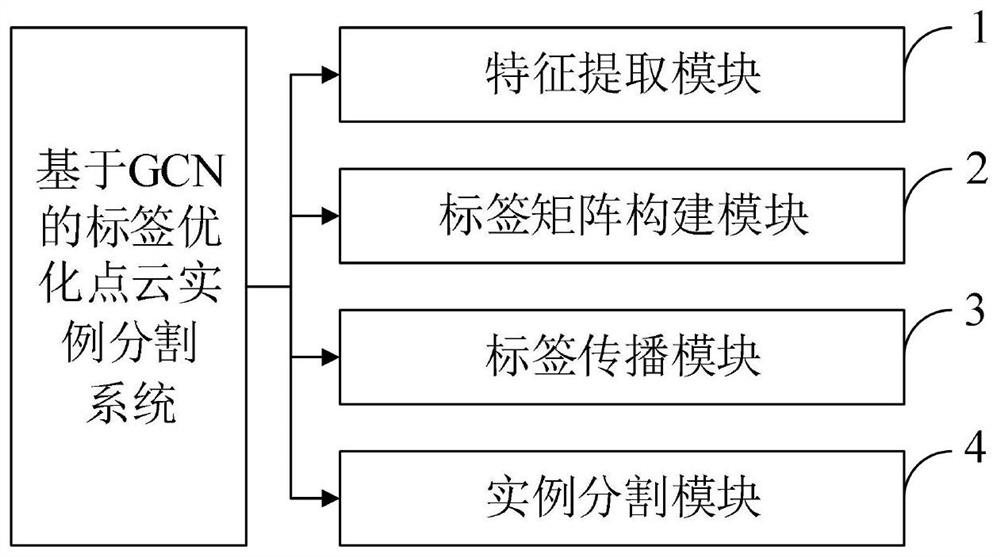
[0088] The present invention designs a technique for instance segmentation of three-dimensional point clouds in large scenes, and in particular relates to an instance segmentation method based on an optimized label matrix as a supervised point cloud segmentation. The GCN-based point cloud feature extraction method provided by the embodiment of the present invention includes:
[0089] Step 1, for point cloud R={x 1 , x 2 ,...,x n}, kind of x u , use the nearest critical point algorithm to calculate the nearest k points as its adjacent points, and calculate the adjacent points of all points in the point cloud;
[0090] Step 2, for point cloud R mapping, the adjacency matrix A of point cloud R is established through the adjacency relationship between points in the point cloud obtained in step 1;
[0091] Step 3, calculate the degree matrix D of the adjacency matrix A, use the degree matrix and the adjacency matrix to calculate the Laplacian matrix L, and normalize the Laplaci...
Embodiment 2
[0100] The three-dimensional point cloud of the large scene described in the present invention is a concept commonly understood in the art, and the data format is a commonly used three-dimensional model data format. For example, the three-dimensional models with .ply, .pcd and .obj as suffixes are all point cloud models, The three-dimensional point cloud of the large scene described in the present invention represents a three-dimensional model modeled in an indoor or outdoor scene. Compared with the common three-dimensional model of a single object, the point cloud of the three-dimensional point cloud of the large scene is scattered and the scale of the point cloud is large. The characteristics increase the difficulty of point cloud segmentation.
[0101] Here is a brief description of the S3DIS dataset: the S3DIS dataset is a large-scale scene point cloud dataset for semantic segmentation, in 271 rooms in 6 regions, using a Matterport camera (combined with 3 structured light s...
Embodiment 3
[0109] The point cloud feature extraction method that the embodiment of the present invention provides is as follows:
[0110] First, do the following operations for each point in the point cloud, here is a point u in the point cloud as an example:
[0111] Sort the distances from other points of the point cloud to point u, and the order of the remaining points from the example point u is sorted from small to large:
[0112] u 1 , u 2 ,...,u k×d ;
[0113] After using Dilated K-NN to determine the Dilated coefficient d, the neighbor node corresponding to point u is u 1 , u 1+d , u 1+2d ,...,u 1+(k-1)d , by adjusting the size of d to determine the expansion distance of the point neighborhood.
[0114] The coefficient d=1 is given by default, and the adjacency matrix A is constructed according to the adjacency relationship between points in the point cloud calculated in the previous step. The construction method of the adjacency matrix A is:
[0115] For a point u, ther...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More