External limb finger control method based on electroencephalogram and myoelectricity cooperation
A control method, EEG technology, applied in medical science, sensors, passive exercise equipment, etc., can solve the problems of occupying the inherent freedom of human limbs, and cannot fully exert the outstanding potential of external limb robots, so as to achieve the realization of construction and use Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] Below in conjunction with the examples, the present invention is further described, the following examples are illustrative, not limiting, and the protection scope of the present invention cannot be limited by the following examples.
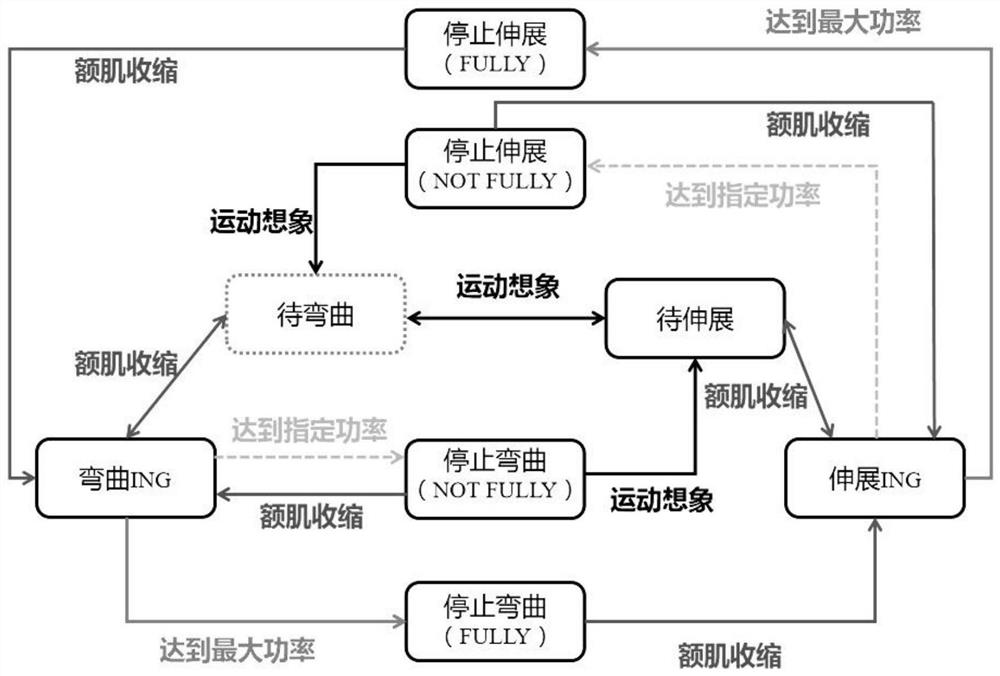
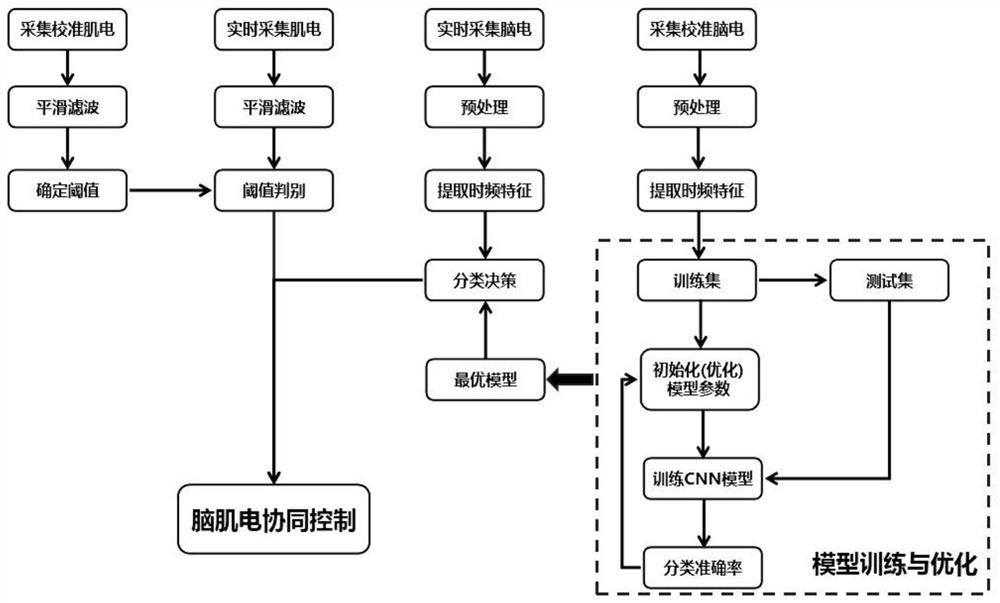
[0036] The basic principle of the present invention is: collect EEG signals through EMG sensors and EEG sensors, and perform operations such as preprocessing on the signals to obtain calibration data; use the calibration data to calculate the discrimination threshold of EMG signals and obtain volumes through training. The convolutional neural network model is used for real-time identification of the user's control intention; based on the calibrated discrimination threshold and the convolutional neural network model, the real-time collection of the user's EEG signal is classified and decided, and the control command is output. The external limb robot is controlled through the EMG signal of frontal muscle contraction and the EEG signal of mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com