Multi-agent path planning method based on deep reinforcement learning
A technology of reinforcement learning and path planning, applied in the field of artificial intelligence, it can solve the problems of lack of communication, slow return convergence, and slow training process of intelligent agents, and achieve the effect of improving convergence speed, reducing computing cost, and improving efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
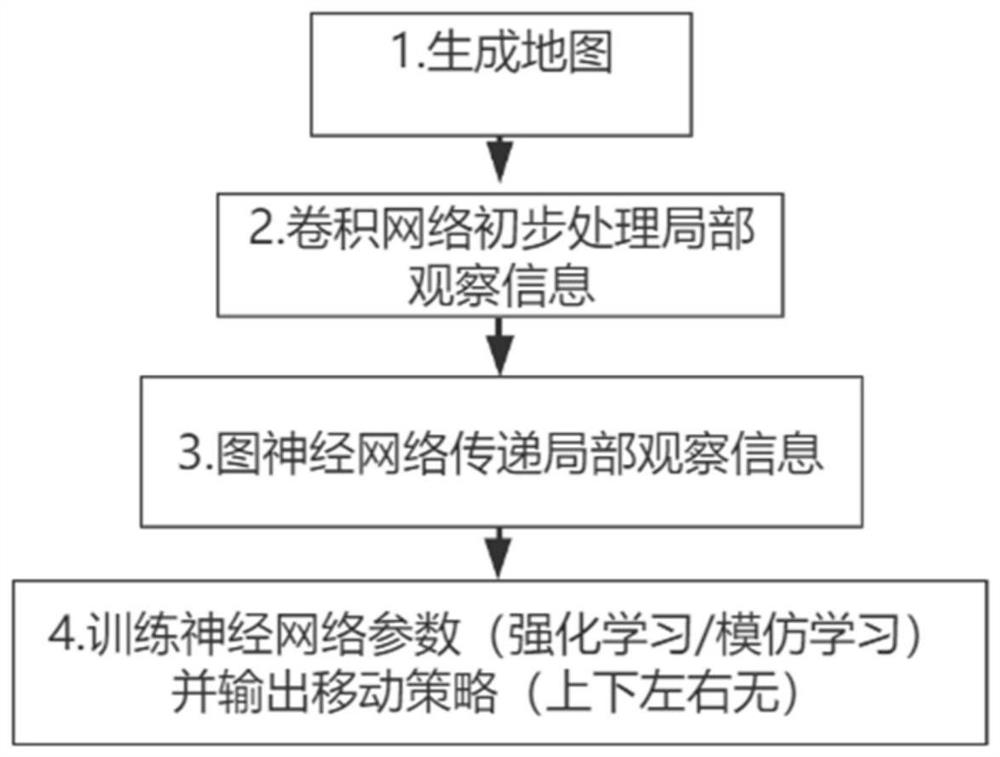
[0034] Such as figure 1 and figure 2 As shown, it is the method flow of the present invention and the specific algorithm network structure. A multi-agent path planning method based on deep reinforcement learning proposed by the present invention includes the following steps:
[0035] S1: Generate a complex data set, in which the starting point and target point of each agent will be randomly generated, and different 2D grid square map sizes, obstacle densities, and the number of agents will be randomly combined.
[0036] Use python to generate or manually design a global grid map, obstacles, a certain number of agent start points and target point binary maps. The grid map is a square with a side length of 10, 50, and 100; the obstacle density is the percentage of the number of obstacle grids in the entire map to the number of map grids, which can be selected as 10%, 30%, and 50%; the number of agents is 4, 8, 32, 512, 1024, the agent must reach the target point, that is, be ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More