

Steering control device
A steering control and steering torque technology, applied in automatic steering control components, steering mechanisms, steering rods, etc., can solve problems such as large impact and impact sound, and driver discomfort, and achieve the effect of suppressing impact and impact sound.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 Embodiment approach
[0041] (structure)
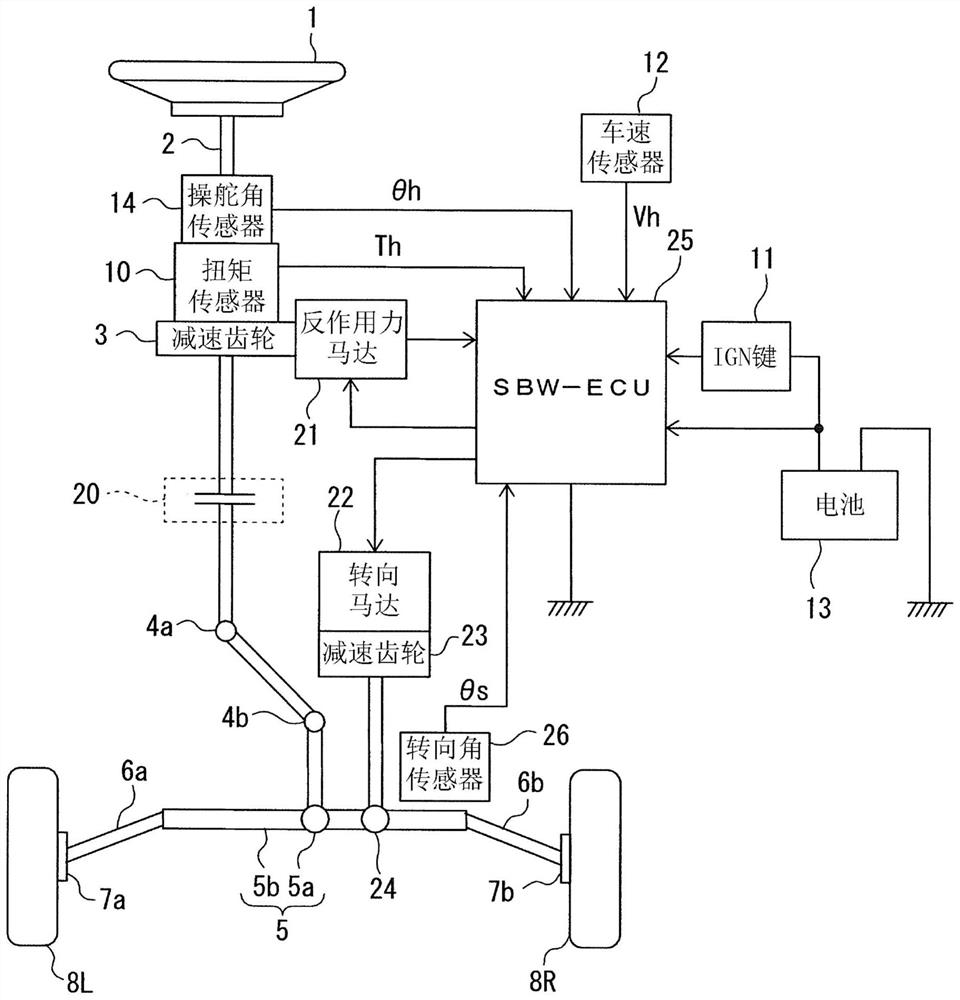
[0042] The present invention is applicable to a steering device that controls the steering angle of a steering mechanism (that is, the steering angle of a steered wheel) according to a target steering angle. figure 1 As an example of such a steering device, a steering device having a steer-by-wire (SBW: Steer By Wire) mechanism that mechanically separates a steering mechanism and a steering mechanism is shown. However, the present invention is not limited to a steering device having a steer-by-wire mechanism, and can be widely applied to various steering devices as long as the steering angle of the steering mechanism is controlled based on a target steering angle.
[0043] The steering shaft (steering shaft, steering wheel shaft) 2 of the steering wheel 1 passes through a reduction gear (worm gear) 3 constituting a reduction mechanism, a backup clutch 20, universal joints 4a and 4b, a rack and pinion mechanism 5, and a steering rod 6a, 6b, and further con...
no. 2 Embodiment approach
[0235] The steering control device according to the second embodiment sets the target angular velocity ωr0 of the angular velocity ω of the first steering angle θs, controls the angular velocity so that the angular velocity ω approaches the target angular velocity ωr0, and performs the same end contact shock mitigation control as described above.
[0236] In the end contact shock mitigation control, as shown in the above formula (3), the steering torque Tm acting in the direction of returning the steering mechanism to the neutral position includes an elastic torque component (K0·θr) and a viscous torque component (μ·ω) .
[0237] The elastic torque (K0·θr) is a component obtained by multiplying the control angle θr by the constant K0, and can be interpreted as a physical quantity having the same unit as the angle.
[0238] On the other hand, the viscous torque (μ·ω) is a component obtained by multiplying the angular velocity ω by a coefficient μ, and can be interpreted as a ph...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More