

Impeller blade robot trajectory constant force tracking deburring method
An impeller blade and robot technology, which is used in manipulators, grinding machine parts, program-controlled manipulators, etc., can solve the problems of large structure size, narrow blade working space, uncontrollable floating accuracy, etc., and achieves strong self-adaptation and high flexibility. , to avoid the effect of reducing the processing quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] In the following description, numerous specific details are given in order to provide a more thorough understanding of the present invention. It will be apparent, however, to one skilled in the art that the present invention may be practiced without one or more of these details. In other examples, some technical features known in the art are not described in order to avoid confusion with the present invention.
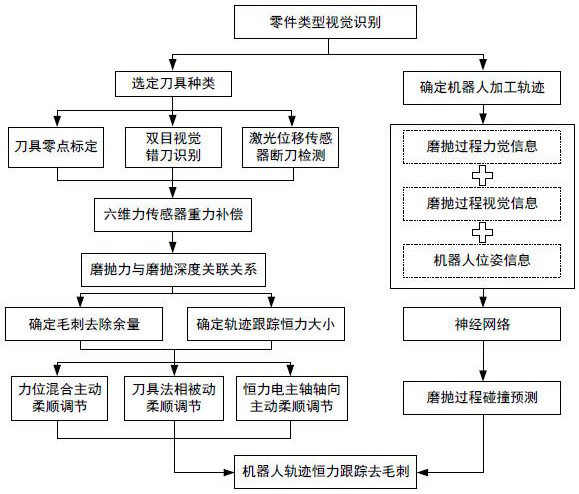
[0038] The applicant believes that the complex spatial surface and weak rigidity of the impeller blades are important reasons for its poor deburring consistency. Force sensor data, and constantly adjust the fit of the grinding trajectory, combine the BP neural network to train the data set, and apply the trained model to the sensorless industrial robot grinding instance, and achieve constant force grinding according to the preset grinding force threshold . In the above-mentioned patent scheme, the sensorless trajectory constant force tracking grinding is reali...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More