

Pilotless automobile capable of adapting to various roads
A technology for unmanned cars and roads, applied to vehicle parts, vehicle safety arrangements, wheel covers, etc., can solve problems such as inability to protect tires, achieve the effect of preventing scratches and prolonging service life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
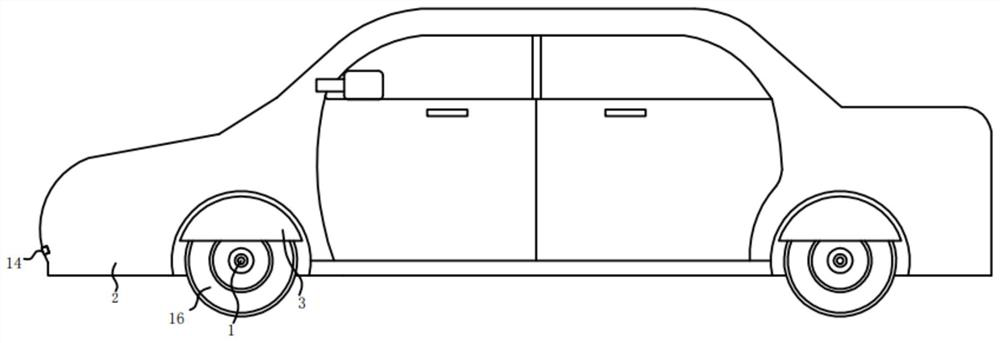
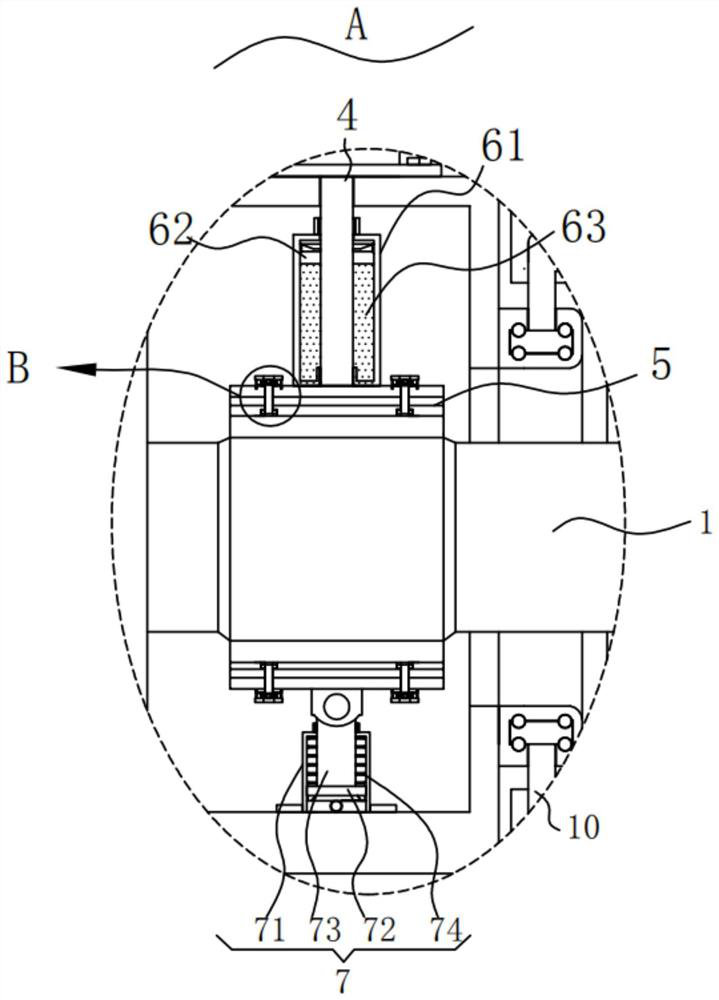
[0048] Please refer to figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Figure 6 , Figure 7 and Figure 8 , wherein, Fig. 1 is a structural schematic diagram of the first embodiment of an unmanned vehicle adaptable to various roads provided by the present invention figure 2 It is a schematic diagram of a partial external structure of the present invention; image 3 for figure 1 Enlarged view of Part A shown;
[0049] Figure 4 for figure 1 Left side view of the shield shown; Figure 5 for figure 1 Right side view of shield shown; Figure 6 for figure 1 Bottom view of the shield shown; Figure 7 for figure 1 Schematic diagram of the structure of the limit assembly shown;
[0050] Figure 8 for figure 1 Schematic diagram of the structure of the positioner shown. Driverless cars that can adapt to a variety of roads, including:
[0051] Axle 1, body shell 2 and wheels 15 arranged on the axle 1;
[0052] A connecting frame 10, the connecting frame...
no. 2 example
[0080] Please refer to Figure 9 , based on the unmanned vehicle adaptable to various roads provided by the first embodiment of the present application, the second embodiment of the present application proposes another unmanned vehicle adaptable to various roads. The second embodiment is only a preferred mode of the first embodiment, and the implementation of the second embodiment will not affect the independent implementation of the first embodiment.
[0081] Specifically, the difference between the self-driving car that can adapt to various roads provided by the second embodiment of the present application is that the self-driving car that can adapt to various roads,
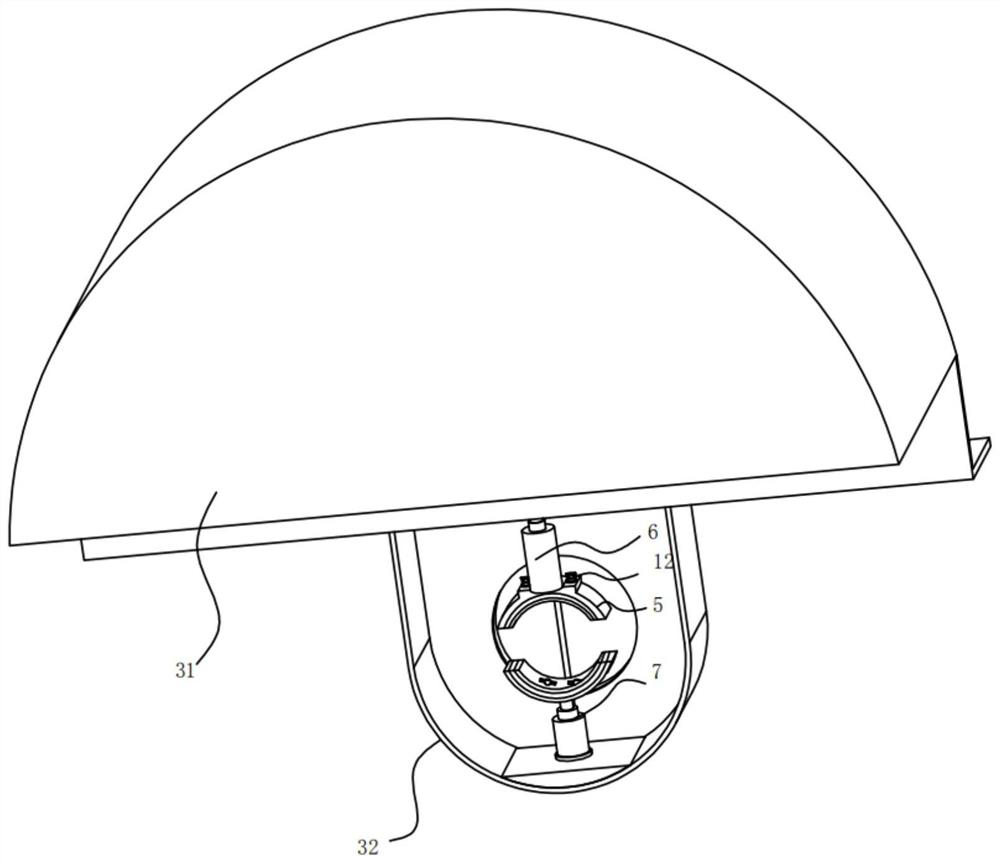
[0082] The inner side of the wheel protection part 31 is provided with a shock absorbing assembly 8, the shock absorbing assembly 8 includes an inner sheet 81 and an outer sheet 82, and a plurality of arc-shaped glue is arranged between the inner sheet 81 and the outer sheet 82. A block 83 , a second elastic ...
no. 3 example
[0087] Please refer to Figure 10 , based on the unmanned vehicle adaptable to various roads provided in the first embodiment of the present application, the third embodiment of the present application proposes another unmanned vehicle adaptable to various roads. The third embodiment is only a preferred mode of the first embodiment, and the implementation of the third embodiment will not affect the independent implementation of the first embodiment.
[0088] Specifically, the difference between the self-driving car adaptable to various roads provided by the second embodiment of the present application is that the driverless car adaptable to various roads, the fixing member 12 includes a circular cover 121 and The positioning shaft 123, the inside of the circular cover 121 is fixed with a spring 124, the positioning shaft 123 runs through the circular cover 121, the fixed piece 51 and the heat insulating layer 52 and extends to the bottom of the heat insulating layer 52, the de...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More