

Target-level semantic positioning method based on vehicle-mounted laser radar
A vehicle-mounted lidar and positioning method technology, applied in the field of high-level autonomous driving positioning, can solve problems such as reduced accuracy, and achieve the effects of wide application, solving positioning drift, and continuous stability and real-time performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
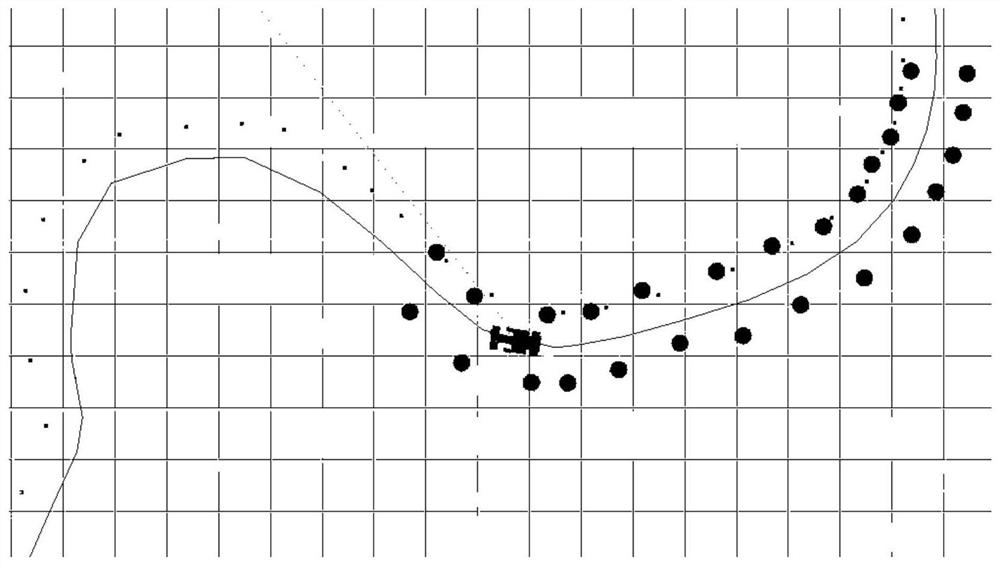
[0080] In this embodiment, in order to reduce costs and facilitate experimental testing, the present invention uses a control-by-wire chassis to simulate the application scene of a vehicle. Among them, the cone barrel is used to simulate the static target of interest. When collecting data, the remote-controlled chassis drives on a track formed by cones, simulating the scene where the vehicle follows the centerline of the structured road in the city. The experimental setup is for the convenience of explaining the details of the present invention, and the actual implementation of the present invention is not therefore limited to the following examples.
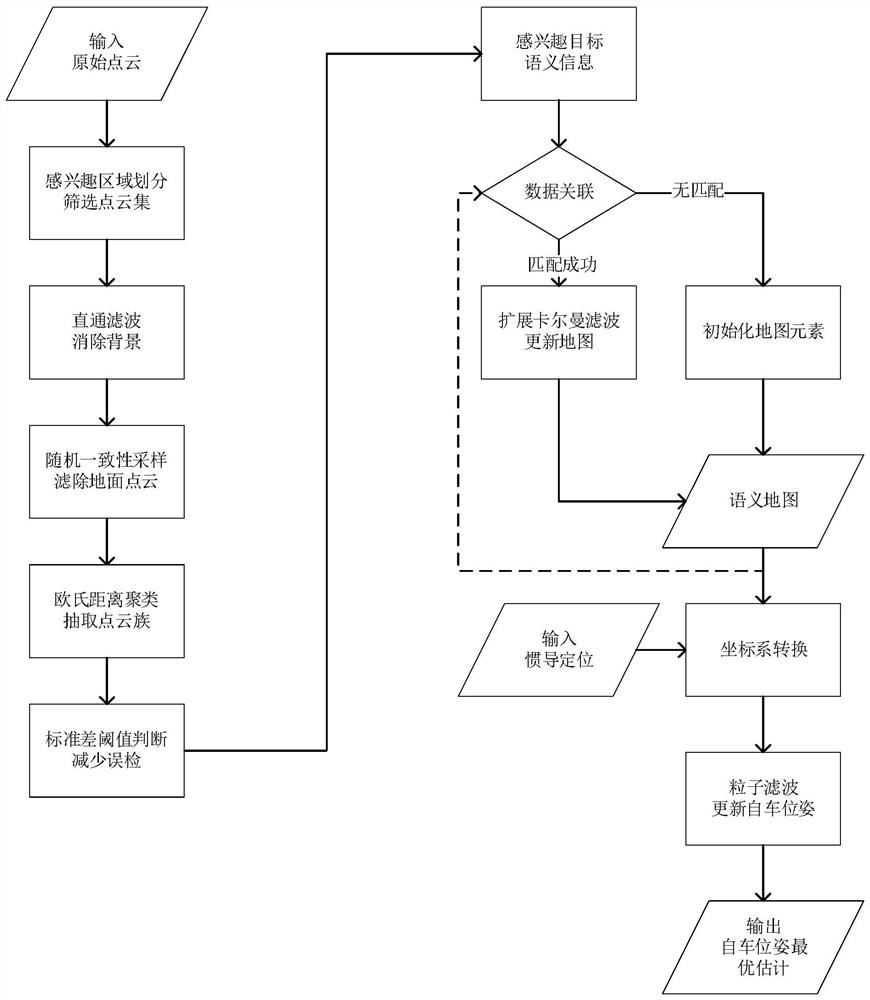
[0081] A target-level semantic localization method based on vehicle lidar, such as figure 1 shown, including the following steps:
[0082] S1. Use the vehicle-mounted lidar to scan the surrounding environment, collect point cloud data and preprocess, specifically including the following steps:
[0083] S1.1. Install the vehic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More