

Electric power unmanned aerial vehicle inspection method and system based on electric power tower model matching
A power tower and model matching technology, applied in control/regulation systems, non-electric variable control, instruments, etc., to avoid damage, improve work efficiency, and reduce data collection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
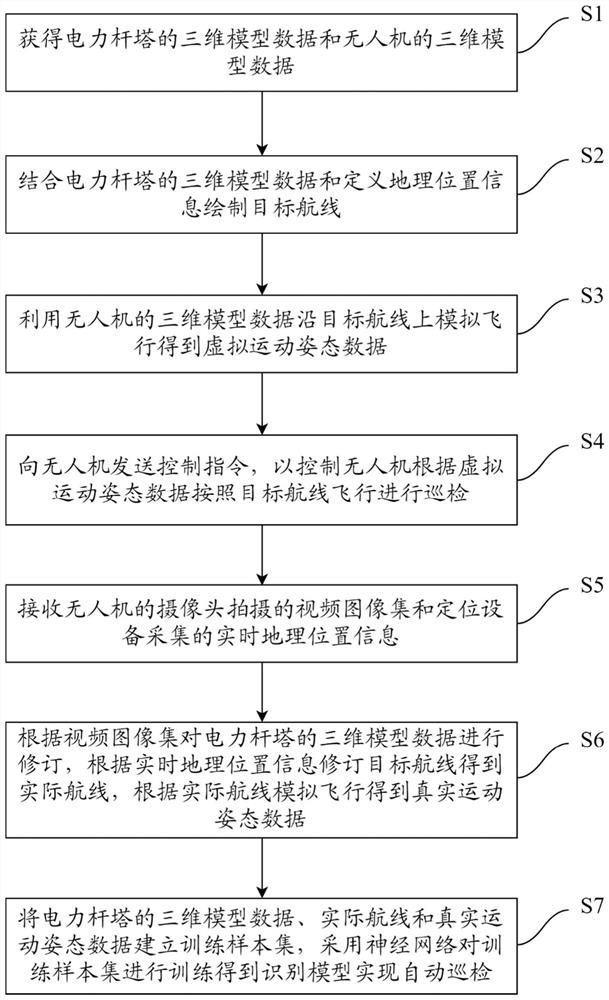
[0044] Refer to attached figure 1 As shown, the present invention provides a technical solution: an electric power UAV inspection method based on power pole model matching, including the following steps:
[0045] S1, obtaining the 3D model data of the power tower and the 3D model data of the UAV.
[0046] It should be noted that the establishment of 3D model data of power towers and UAVs is the 3D software that is currently available in the market, including any of Pro / Engineer, Solidworks, CATIA, UG-NX and Cimatron.
[0047] Specifically, the ratio of the three-dimensional model data of the power tower and the three-dimensional model data of the drone to the model data should be the same as that of the real object.
[0048] S2, combining the three-dimensional model data of the power tower and the defined geographic location information to draw the target route.
[0049] Further, combining the three-dimensional model data of the power tower and the defined geographic locatio...
Embodiment 2
[0067] Refer to attached figure 2 As shown, the power UAV inspection system based on power pole model matching includes:
[0068] An acquisition module, the acquisition module is used to obtain the three-dimensional model data of the power tower and the three-dimensional model data of the unmanned aerial vehicle;
[0069] Drawing module 120, described drawing module 120 is used for setting and defining geographic position information and drawing target route;
[0070] Simulation module 130, described simulation module 130 is used for utilizing the three-dimensional model data of unmanned aerial vehicle to obtain virtual movement posture data along the simulated flight on the target route;
[0071] A control module 140, the control module 140 is used to send control instructions to the UAV, so as to control the UAV to fly according to the target route according to the virtual motion posture data;
[0072] Acquisition module 150, described acquisition module 150 is used for r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More