

Positioning clamping detection device based on stereoscopic vision recognition sensor and method
A technology of stereo vision and detection device, applied in manipulators, program-controlled manipulators, sorting and other directions, can solve the problems of visual recognition system positioning allowance calculation deviation, lack of clamping mechanism in-position detection, and insufficient clamping mechanism installation. Achieve the effect of improving the shaking problem, stable clamping and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
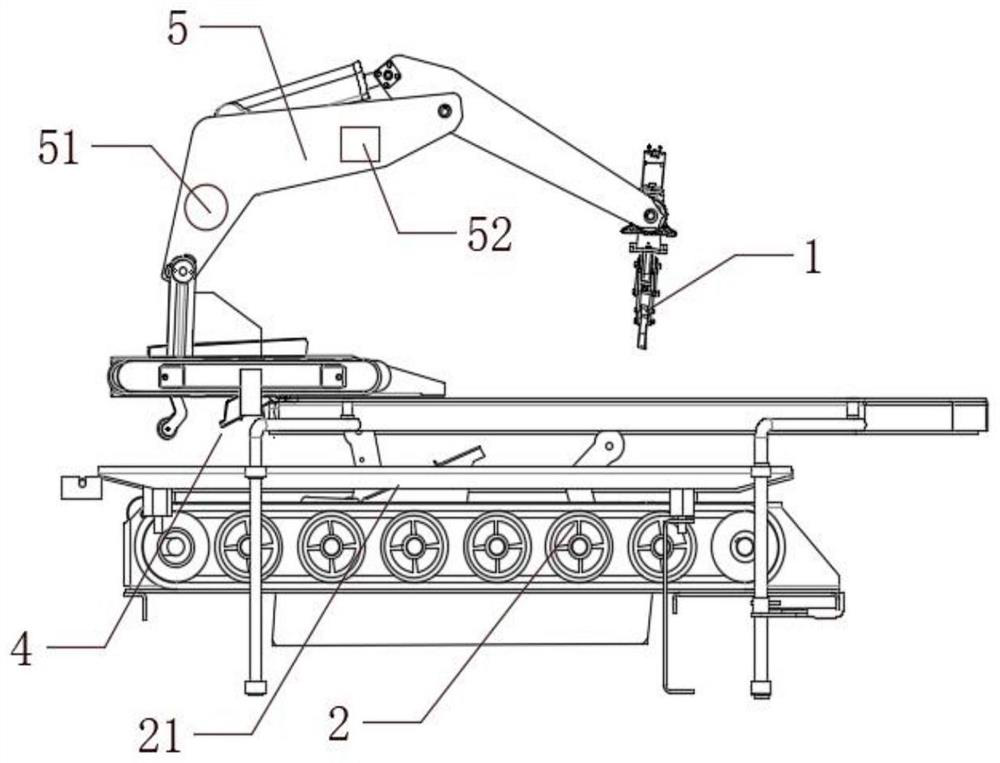
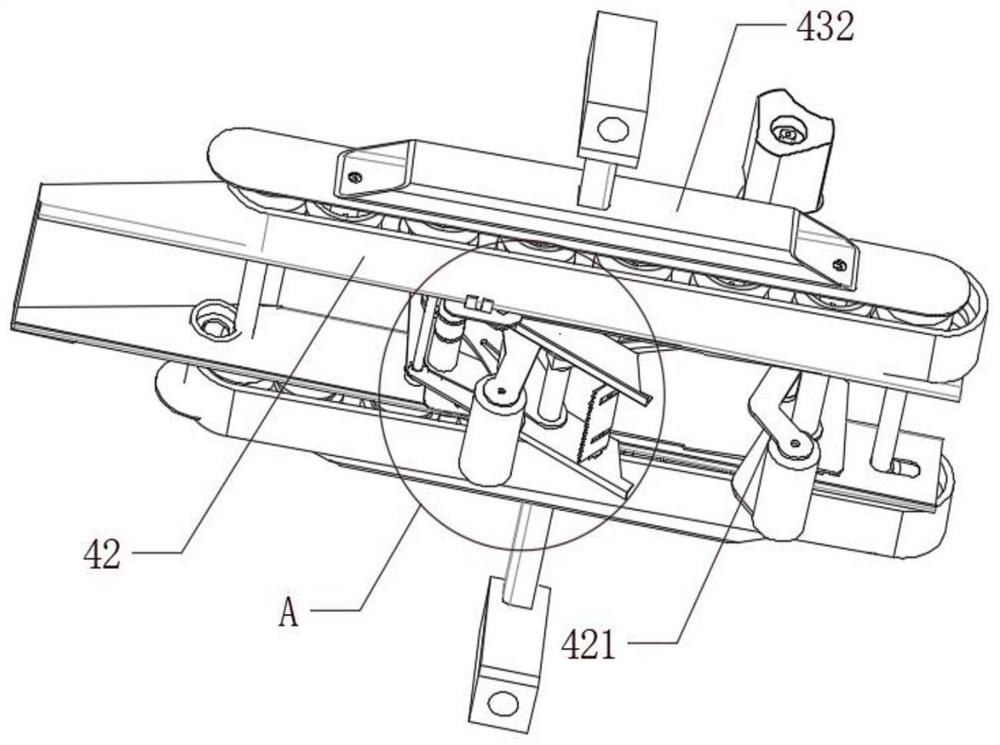
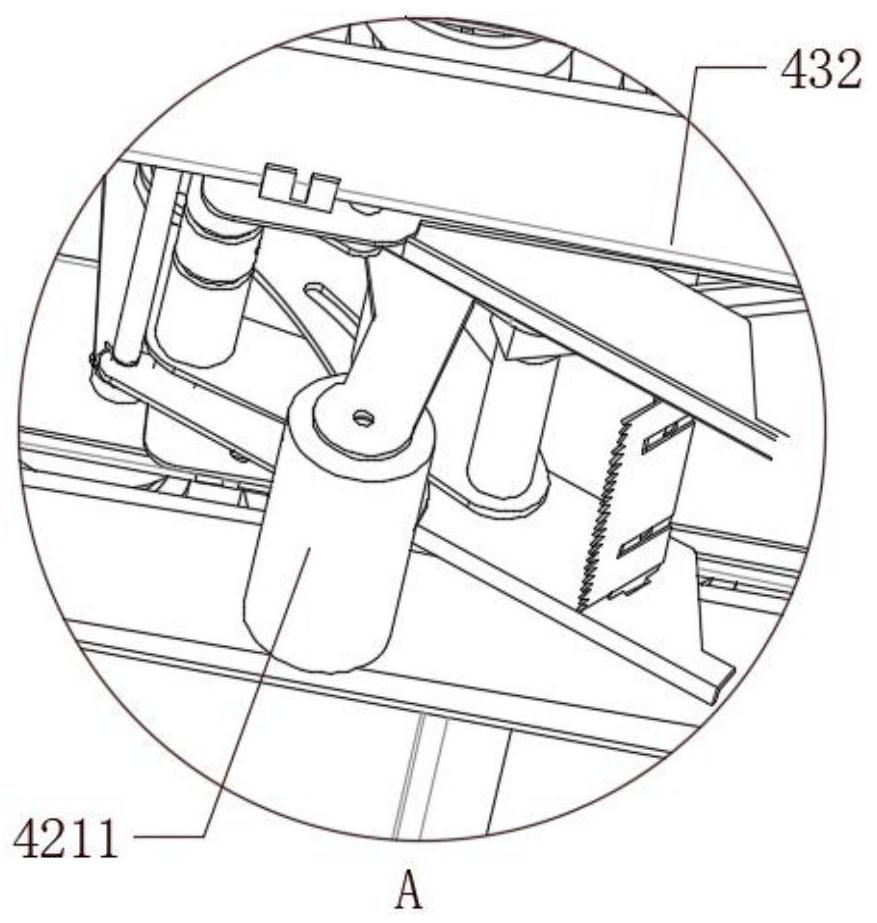
[0042] Such as Figure 1-6 As shown, the positioning clamping detection device based on the stereo vision recognition sensor of the present invention includes a clamping mechanism 1, a transport mechanism 2 and a visual detection mechanism 3, the visual detection mechanism 3 is placed above the transportation mechanism 2, and the visual detection mechanism 3 pairs The target object 10 on the transportation mechanism 2 is identified and detected, the positioning information of the target object is obtained, and the positioning information is transmitted to the external control system, and then the clamping mechanism 1 clamps the target object.
[0043] The positioning and clamping device used in the stereoscopic visual recognition of the present invention calculates the three-dimensional coordinates and posture of the target object in real time through the visual system, human-computer interaction, three-dimensional reconstruction, etc., and transmits the data signal to the exte...
Embodiment 2
[0054] This embodiment is a further improvement of the previous embodiment, such as Figure 1-6 As shown, the positioning clamping detection device based on the stereo vision recognition sensor of the present invention includes a clamping mechanism 1, a transport mechanism 2 and a visual detection mechanism 3, the visual detection mechanism 3 is placed above the transportation mechanism 2, and the visual detection mechanism 3 pairs The target object 10 on the transportation mechanism 2 is identified and detected, the positioning information of the target object is obtained, and the positioning information is transmitted to the external control system, and then the clamping mechanism 1 clamps the target object.
[0055] The positioning and clamping device used in the stereoscopic visual recognition of the present invention calculates the three-dimensional coordinates and posture of the target object in real time through the visual system, human-computer interaction, three-dimens...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More