

A global pattern search method for the optimal control problem of a two-degree-of-freedom manipulator
An optimal control and global mode technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems that mode search can only find local solutions and slow search, and achieve the effect of improving practicability and rapid iteration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
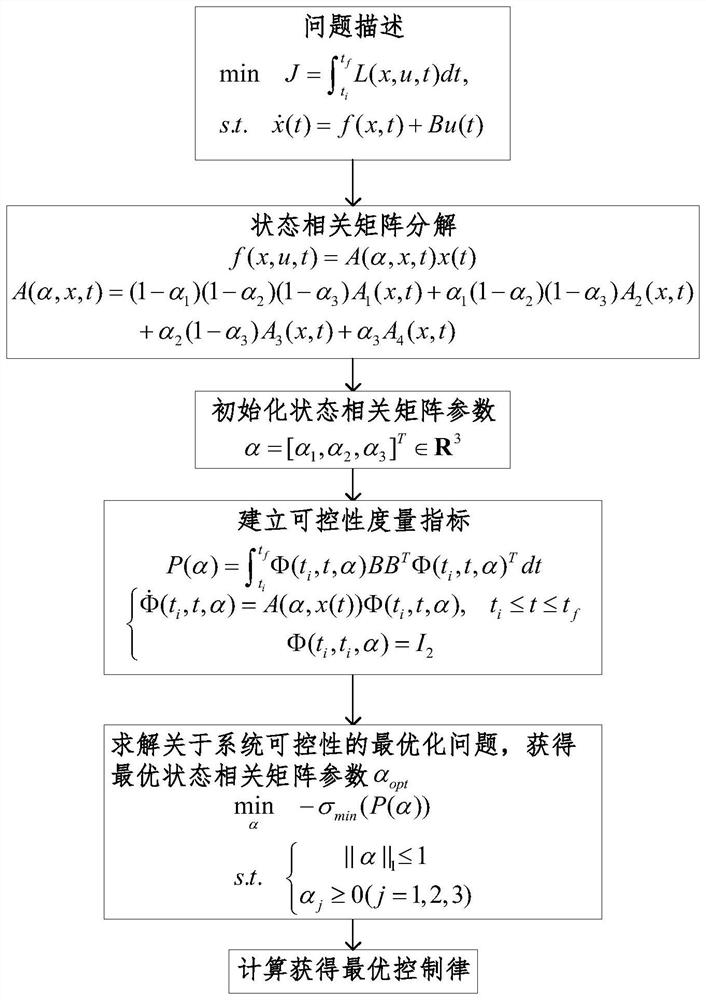
[0026] Before explaining the embodiment, the nonlinear optimal control problem of the two-degree-of-freedom manipulator is explained, such as figure 2 shown, as follows:
[0027]
[0028]
[0029] In formula (1), x(t)∈R 2 is the system state quantity, u(t)∈R is the control quantity, f(x,t)∈R 2 is the system nonlinear function vector, B∈R 2×1 is a constant matrix; J∈R is the performance index to be optimized by the system, L(x,u,t)∈R is the performance function, t i ∈R, t f ∈R are the start time and end time of the problem, respectively; among them, the nonlinear vector f(x, u, t) uses four different state correlation matrices A i (x,t)∈R 2×2 , i=1,2,3,4 is expressed in the following form:
[0030] f(x,u,t)=A(α,x,t)x(t) (2)
[0031] A(α,x,t)=(1-α 1 )(1-α 2 )(1-α 3 )A 1 (x,t)+α 1 (1-α 2 )(1-α 3 )A 2 (x,t)+α 2 (1-α 3 )A 3 (x,t)+α 3 A 4 (x,t) (3)
[0032] In formula (2) and formula (3), α=[α 1 ,α 2 ,α 3 ] T ∈R 3 is the corresponding state correlation ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More