

Positioning method and device, electronic equipment and storage medium
A technology of electronic equipment and positioning method, applied in the field of robotics, can solve problems such as positioning failure, high mobility of personnel, complex environment, etc., and achieve the effect of improving robustness and reducing costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
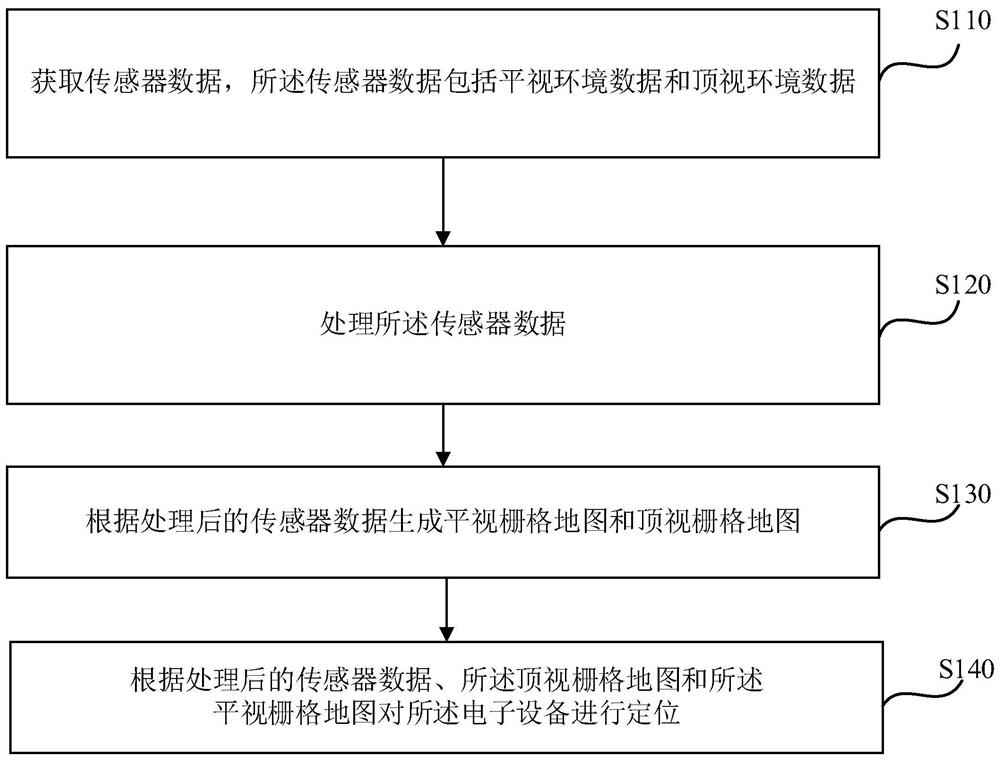
[0064] figure 1 It is a schematic flow chart of a positioning method provided by Embodiment 1 of the present invention. This method is applicable to indoor positioning of electronic equipment. The method can be performed by a positioning device, wherein the device can be implemented by software and / or hardware. And generally integrated on electronic equipment. Wherein, the electronic device may be a device that can move actively or passively. Exemplarily, the electronic device may be a robot. The application scenario of the robot is not limited, and can be indoor or outdoor. It should be noted that this embodiment uses an indoor robot as an example to describe the electronic device, and the electronic device is not limited here. The implementation of the electronic device other than the indoor robot is the same or similar to that of the indoor robot.
[0065] Robots in the present invention include indoor robots and outdoor robots. Outdoor robots can be considered as robot...
Embodiment 2
[0172] figure 2 It is a schematic structural diagram of a positioning device provided in Embodiment 2 of the present invention, which is applicable to the positioning of electronic equipment, wherein the device can be implemented by software and / or hardware, and is generally integrated on electronic equipment.
[0173] like figure 2 As shown, the device includes:
[0174] An acquisition module 21, configured to acquire sensor data, the sensor data comprising head-up environment data and top-view environment data;
[0175] A processing module 22, configured to process the sensor data;
[0176] Generation module 23, for generating head-up grid map and top-view grid map according to the processed sensor data;
[0177] The positioning module 24 is configured to locate the electronic device according to the processed sensor data, the top-view grid map and the head-up grid map.
[0178] In this embodiment, the device first obtains sensor data through the acquisition module 21,...
Embodiment 3
[0198] image 3 It is a schematic structural diagram of an electronic device provided by Embodiment 3 of the present invention. like image 3 As shown, the electronic device provided by Embodiment 3 of the present invention includes: one or more processors 31 and storage devices 32; the processors 31 in the electronic device may be one or more, image 3 Take a processor 31 as an example; the storage device 32 is used to store one or more programs; the one or more programs are executed by the one or more processors 31, so that the one or more processors 31 Implement the positioning method described in any one of the embodiments of the present invention.
[0199] The electronic device may further include: an input device 33 and an output device 34 .
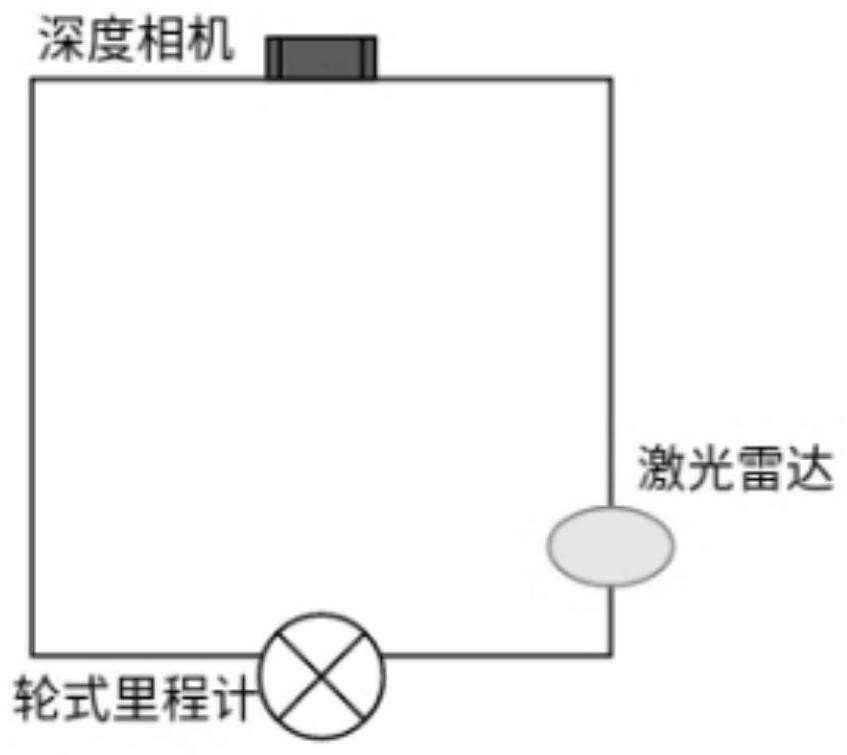
[0200] In one embodiment, the electronic device further includes: a top-view sensor and a head-up sensor;
[0201] The head-up sensor is used to collect the head-up environment data of the running direction of the electronic de...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More