

Planning method for smooth transition between linear tracks of self-driven articulated arm measuring machine
A technology of smooth transition and trajectory planning, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems affecting trajectory smoothness, mechanical vibration, etc., and achieve the effect of improving measurement accuracy and continuous end speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
[0038] The present invention provides a planning method for smooth transition between linear trajectories of a self-driven articulated arm measuring machine. The flow chart is as follows figure 1 shown. Include the following steps:
[0039] Step 1: Enter the parameters and constraints required for trajectory transition
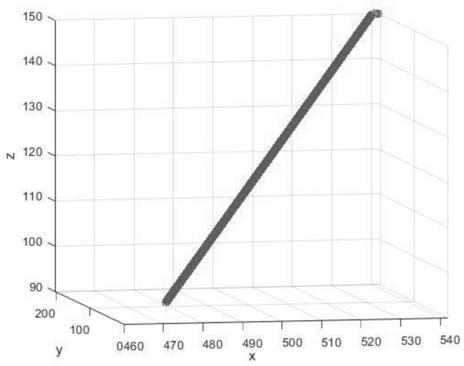
[0040] The end pose of the self-driven articulated arm measuring machine is jointly described by the 3×1 position vector P and the 3×3 attitude matrix R. The poses of the starting point, middle point and end point are arbitrarily specified by the operator, and the position coordinates are set to set as P 0 (461.9,0,127.9),P 1 (5 40, 200, 150), P 2 (542,203,150). Constraints are set as: end maximum velocity V max =100mm / s, maximum acceleration A max =100mm / s 2 .
[0041] Step 2: Establishment of transition model
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More