

Wall-climbing robot based on roller type suction cup
A wall-climbing robot and roller-type technology, applied in the field of wall-climbing robots, can solve the problems of poor stability and difficult to maintain accuracy, and achieve the effects of excellent obstacle crossing ability, overturn prevention and clear boundary.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The above and other technical features and advantages of the present invention will be described in more detail below in conjunction with the accompanying drawings.
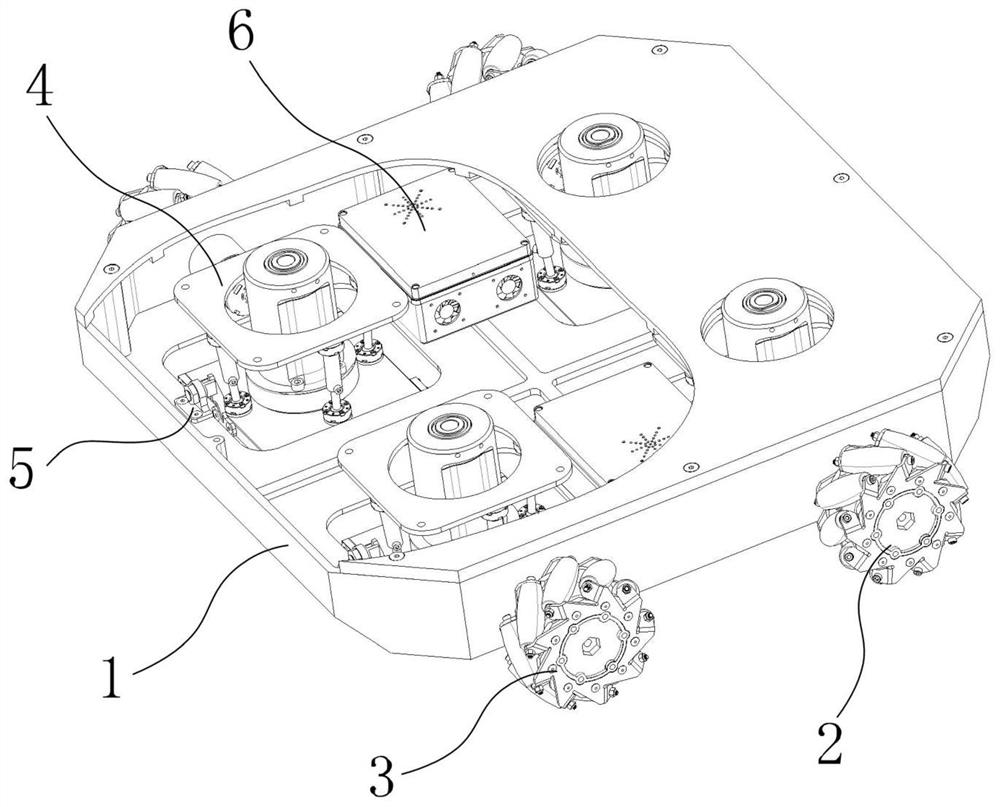
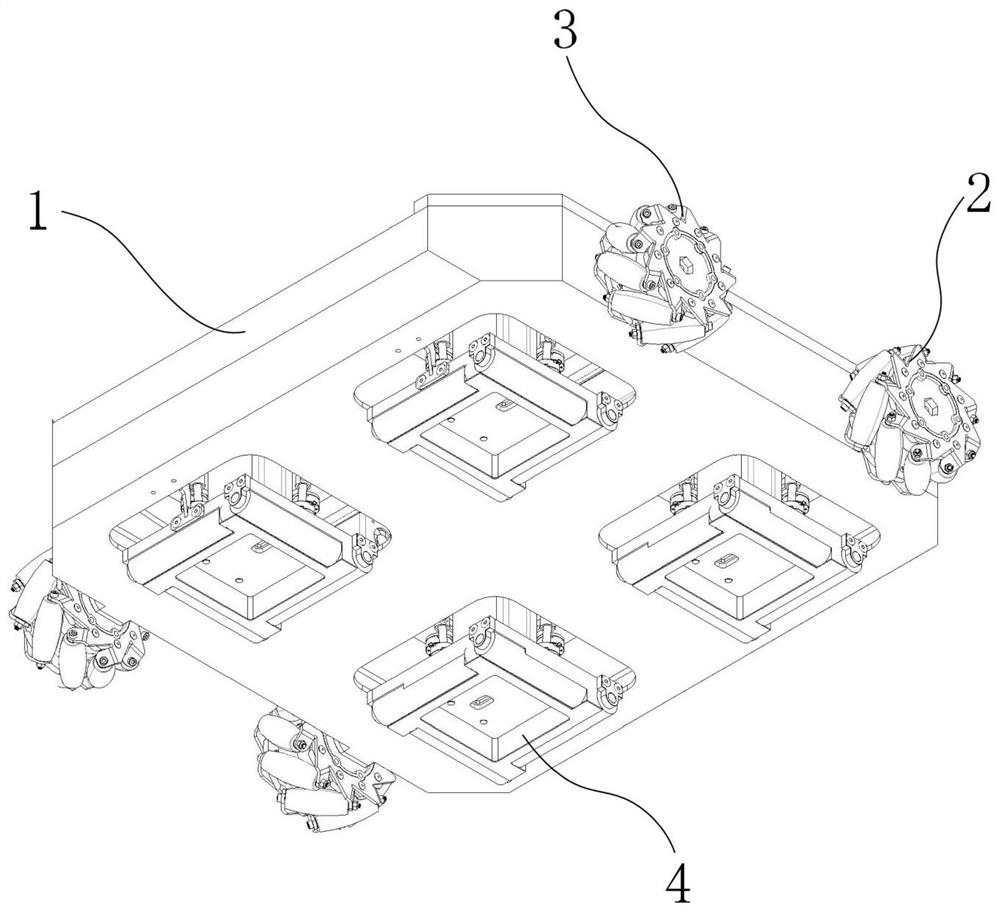
[0027] Such as figure 1 , figure 2 as shown, figure 1 It is a top three-dimensional structural view of the wall-climbing robot based on the roller suction cup; figure 2 It is the bottom three-dimensional structural view of the wall-climbing robot based on the roller suction cup. The wall-climbing robot based on roller suction cups of the present invention includes a housing 1 , a left wheat wheel assembly 2 , a right wheat wheel assembly 3 , a roller suction cup assembly 4 , a constraint assembly 5 and an electric control box assembly 6 .
[0028] There are two left-type wheat wheel assemblies 2 and two right-type wheat wheel assemblies 3 respectively arranged on both sides of the housing 1, and the same-type wheat wheel assemblies are installed on the same diagonal line of the housing 1. The roller ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More