

Five-axis curved surface machining path planning method based on differential vector optimization
A technology of processing trajectory and vector, applied in the direction of comprehensive factory control, program control, instrument, etc., can solve the problems of reducing the processing quality of the workpiece, the movement is not smooth enough, and the selection of the tool axis vector angle is not appropriate, so as to improve the processing quality and avoid accumulation Effect of error, feed motion smoothing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0062] This embodiment provides a five-axis curved surface machining trajectory planning method based on differential vector optimization, which is used to optimize the machining trajectory of a five-axis machine tool. The tool of the five-axis machine tool processes a workpiece to be processed according to the optimized processing trajectory.
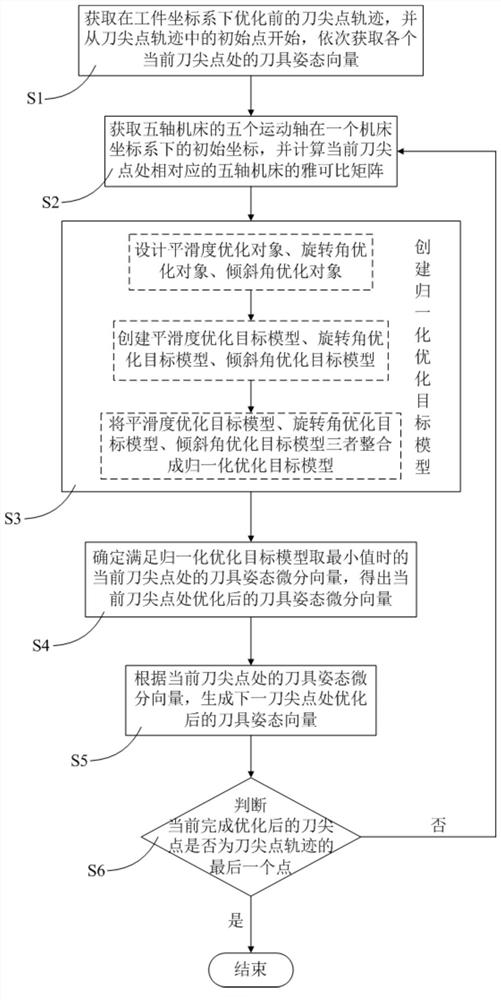
[0063] see figure 1 , The processing trajectory planning method provided in this embodiment includes the following steps, that is, includes steps S1 to S6.
[0064] S1. Obtain the tool nose point trajectory before optimization in a workpiece coordinate system, and start from the initial point in the tool nose point trajectory, and sequentially obtain the tool attitude vectors at each current tool nose point. In this embodiment, the tool nose point trajectory E before optimization i The expression formula is:
[0065] E. i ={x i ,y i ,z i}
[0066] where x i It is the horizontal coordinate of the current tool nose point. the y...
Embodiment 2
[0158] This embodiment provides a computer, which includes a memory, a processor, and a computer program stored in the memory and operable on the processor. The computer program running on the processor is used to implement the differential vector optimization based on the differential vector optimization in Embodiment 1. Path planning method for five-axis surface machining.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More