

Moving target curve control data construction method
A construction method and a technology of moving objects, applied in the direction of program control, digital control, comprehensive factory control, etc., can solve the problems that the acceleration and jerk continuity cannot be guaranteed, and affect the control effect, etc., so as to increase kinematic parameter information and improve tracking Accuracy, the effect of reducing tracking error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0039] The present invention will be further described below in conjunction with the accompanying drawings:
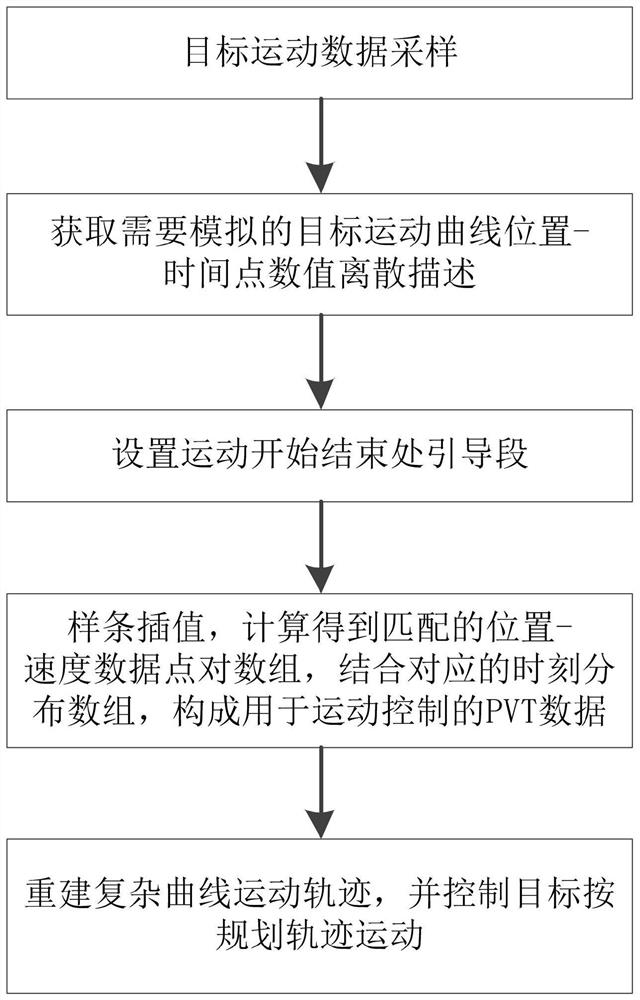
[0040] as attached figure 1 As shown, the method for constructing the moving target curve control data of the present invention includes the following steps:
[0041] Target motion data sampling;
[0042] Obtain the numerical discrete description of the position-time point of the target motion curve to be simulated;
[0043] Set the guide segment at the beginning and end of the motion: set the time span of the guide segment to 1s, or set it according to the kinematic characteristics of the target curve, to ensure that the guide segment can make the movement of the simulator complete the transition smoothly.
[0044] There are two types of settings for the boot segment:
[0045] 1. The target motion curve can be described by a mathematical analytical expression. At this time, the real-time velocity, acceleration and other kinematic characteristics of the curve are ob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More