

Intelligent trolley path planning method based on trapezoid obstacles
A smart car and path planning technology, applied in vehicle position/route/height control, motor vehicles, two-dimensional position/channel control, etc., to reduce moving distance and reduce motion loss
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0040] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
[0041] The purpose of the present invention is to provide a path planning method for the smart car to cross trapezoidal obstacles, adding obstacle height information and slope information into the constraint conditions of path planning, so that when the smart car encounters obstacles or slopes that can be crossed , it is not necessary to go around to avoid obstacles, but can directly cross the obstacle, reducing the moving distance of the robot, reducing motion loss, and enabling the smart car to run for a longer time under the condition of limited energy.
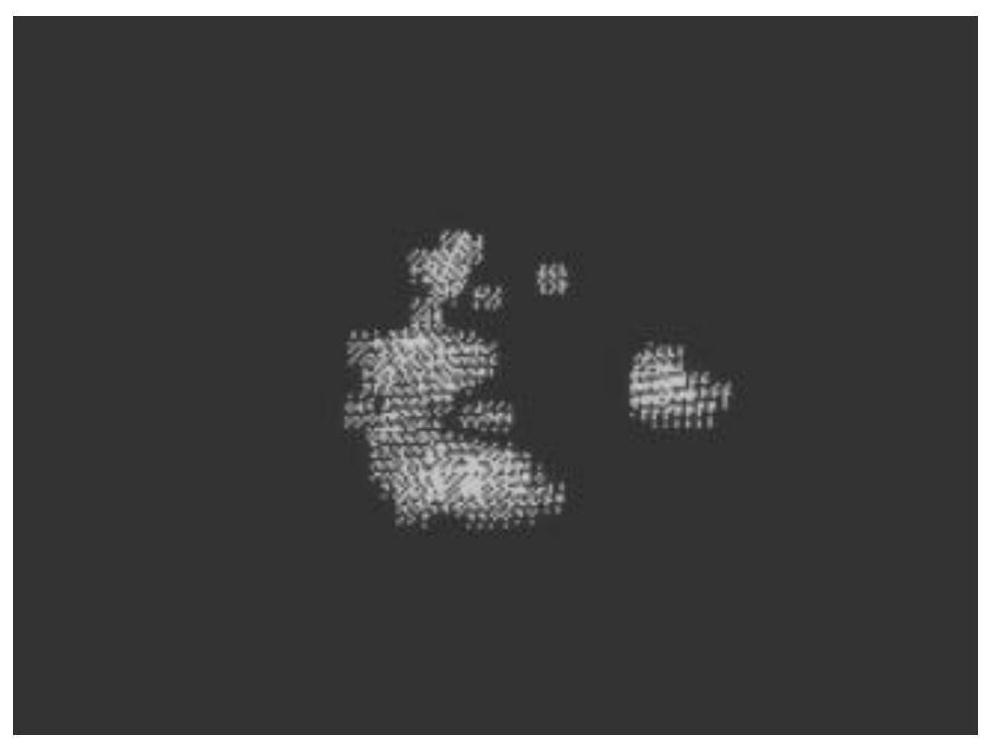
[0042] The idea of the present invention is to use visual SLAM technology to construct a model of the surrounding environment of the smart car, and express it in the form of a point cloud map; and set a threshold value for the slope of the obstacle according to the climbing ability of the smart car, and then...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More