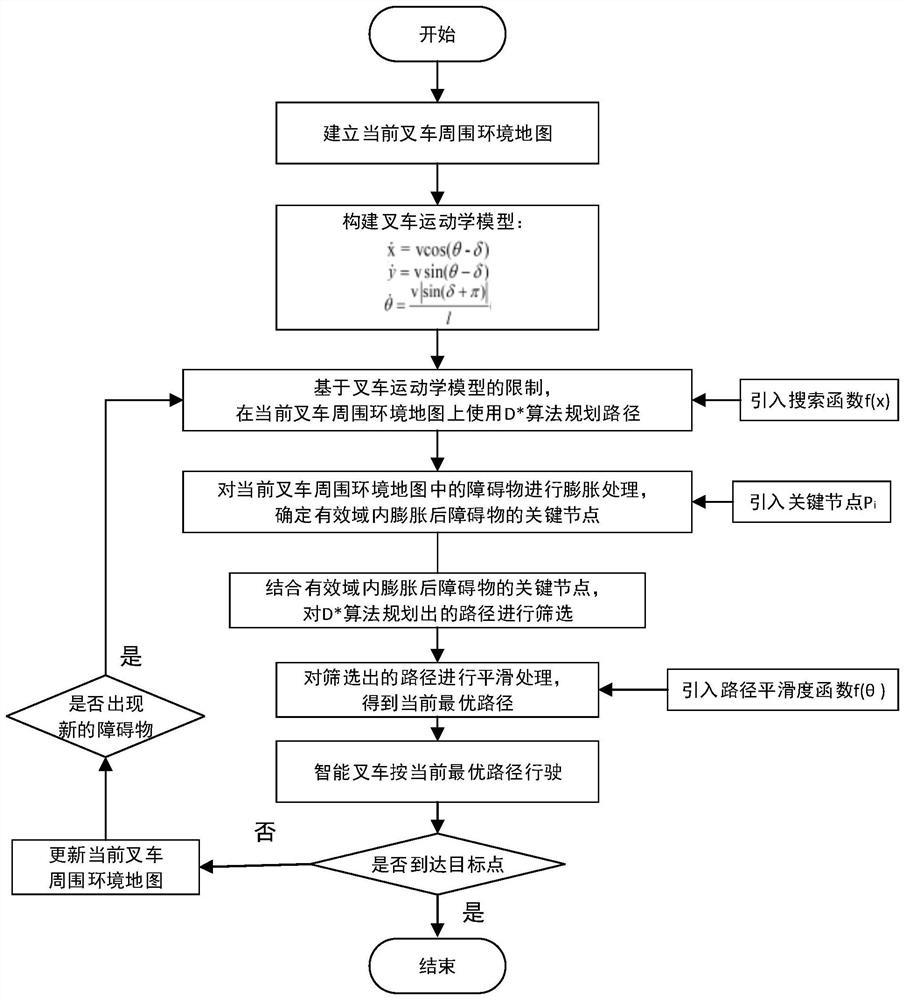
Forklift path planning method and device based on optimized D* algorithm
A path planning and optimal path technology, applied in two-dimensional position/channel control, vehicle position/route/altitude control, motor vehicles and other directions, can solve the problems of low path passing rate and unwalkable planned path, and achieve improved performance. The effect of passing rate, improving path passing rate, and efficient passing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] In order to make the objectives, technical solutions and advantages of the present invention, the present invention will be described in further detail below with reference to the accompanying drawings and examples.
[0036] Device Embodiment:
[0037] The forklift path planning device based on the optimized D * algorithm based on this embodiment includes: an environmental perceive system and a controller. Among them, the environmental perception system arrangement on the truck Figure 4 , Figure 5 The sensors used by the environmental perception system include: multi-wire laser radar 1, master GPS2, a sub-GPS3, inertial measuring unit 4, and a spanning sensor 5. Among them, multi-wire laser radar 1 is mounted in the middle of the top of the forklift, and the distance from the forklift is equal, the sensor coordinate axis is in the direction of the forklift, and after the global coordinate system is established, this direction and global coordinate system horizontal axis The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



