

Planning method for walking path of robot
A technology of robot and walking direction, applied in the direction of instruments, motor vehicles, two-dimensional position/channel control, etc., can solve the problems of low efficiency of obstacle avoidance and single obstacle avoidance processing method, so as to improve the efficiency of obstacle avoidance and improve the universality , the effect of ensuring safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
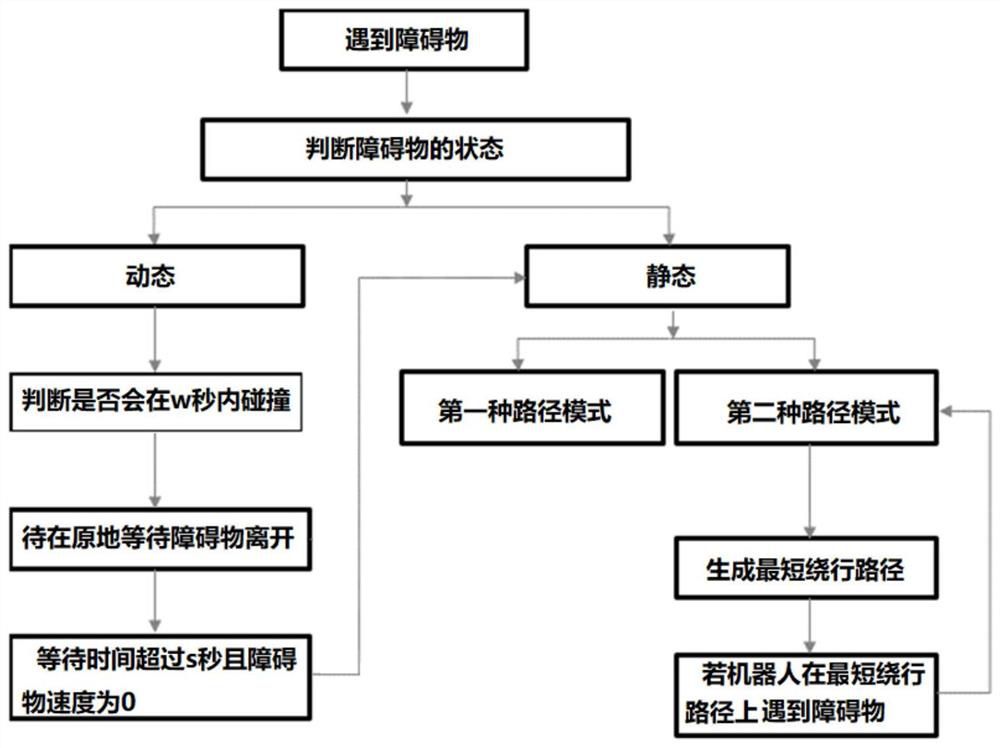
[0032] Such as figure 1 As shown, the planning method of a robot walking path in the present invention can greatly improve the obstacle avoidance efficiency of the robot by adopting different obstacle avoidance methods for obstacles in different states, thereby improving the patrol efficiency of the robot, and further ensuring Mobile security for robots. Specifically, the specific steps of a planning method for a robot walking path of the present invention are as follows:
[0033] First, the spatial information is obtained and the walking path is generated according to the spatial information. It is worth noting that the spatial information refers to the environment information of the robot, including path information and static object information in the environment. In this embodiment, the information of the entire space is acquired through a camera or a sensor. Further, the walking path generated by the present invention according to the spatial information includes two pa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More