

Obstacle avoidance control method and system for six-axis mechanical arm and computer readable storage medium
A six-axis robot arm and control method technology, applied in computing, manipulators, comprehensive factory control, etc., to achieve the effect of improving obstacle avoidance efficiency and high versatility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0054] The concept, specific structure and technical effects of the present application will be clearly and completely described below in conjunction with the embodiments and drawings, so as to fully understand the purpose, scheme and effect of the present application. It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other.
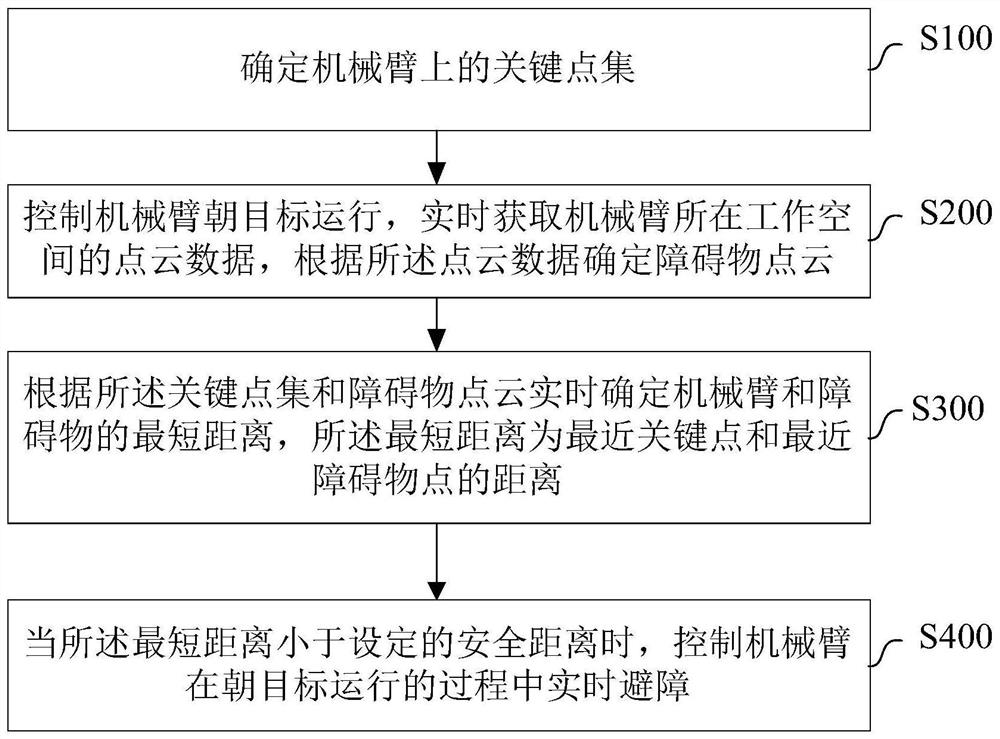
[0055] refer to figure 1 ,Such as figure 1 Shown is a six-axis robotic arm obstacle avoidance control method provided by the embodiment of the present application, and the method includes the following steps:
[0056] Step S100, determine the set of key points on the mechanical arm; wherein, the set of key points includes a plurality of key points, and the ball with each key point as the center of the sphere can meet the requirements of covering the entire mechanical arm when it is in any pose. arm;
[0057] In the embodiment provided by the pre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More